
技术摘要:
本申请公开一种通讯协议转换电路及机器人设备,通讯电路包括:转换电路、切换电路及通讯接口,通过切换电路控制输出到负载的信号满足不同通讯协议,应用在机器人设备时,不同通讯协议的舵机可以进行交叉使用,减少专用通讯协议芯片的使用,减少舵机的种类的开发周期, 全部
背景技术:
目前,市面上的中小型的数字舵机常用的通讯方式有两种,一种是串口通讯,另一 种是CAN总线通讯,但是如果机器人身上需要用到两种类型通讯舵机的时候就需要做兼容 处理。通常,为对应的不同通讯方式将采用专用的通讯芯片,会导致成本升高;另外,在更需 要换舵机的时候,往往是会遇到新装的舵机与专用的通讯芯片不兼容问题,导致更换失败, 降低生产效率
技术实现要素:
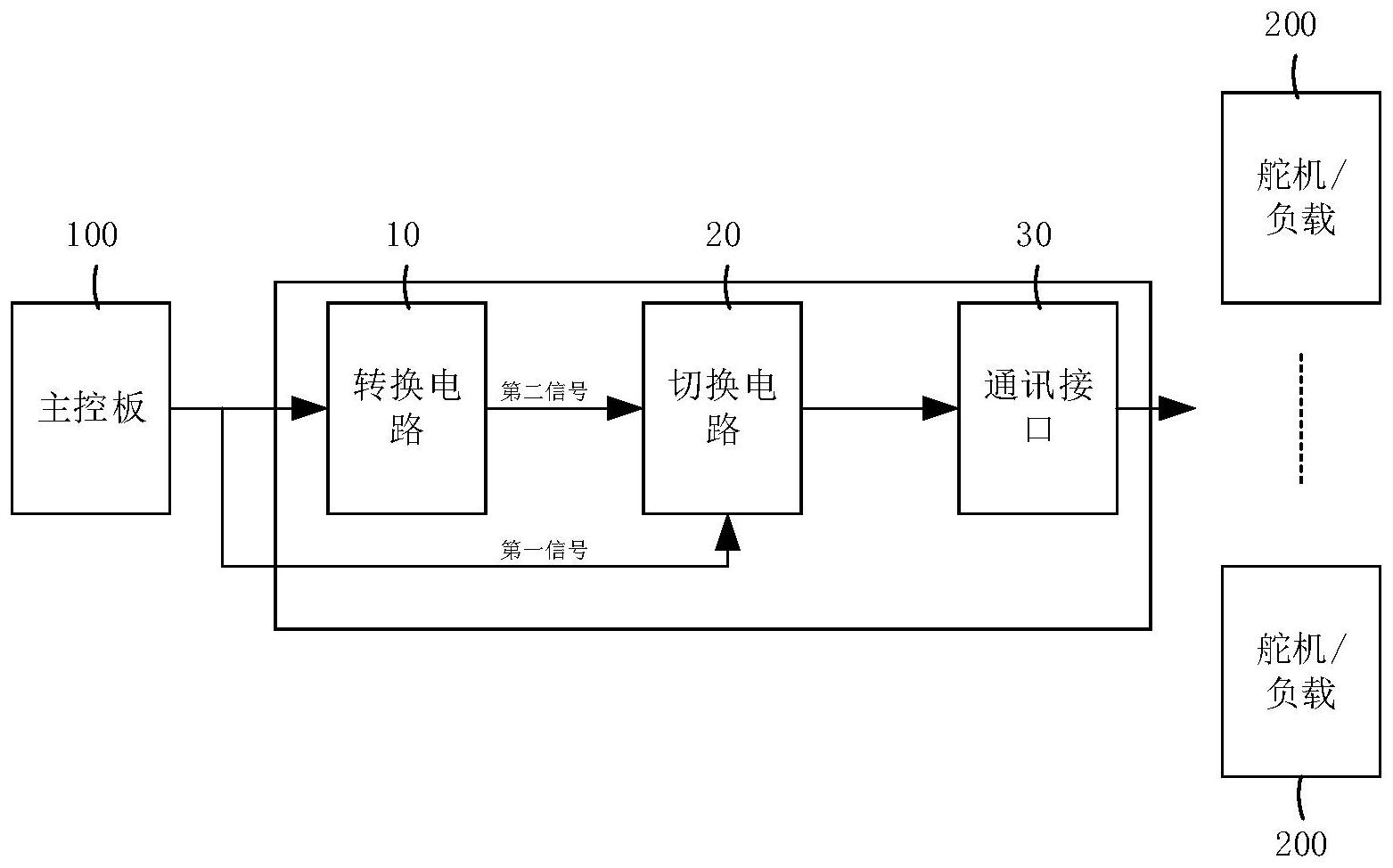
本申请的目的在于提供一种通讯协议转换电路及机器人设备,旨在解决传统的通 讯电路使用专用芯片导致成本高,兼容性差的问题。 本申请实施例的第一方面提了一种通讯协议转换电路,包括: 转换电路,接收第一通讯协议的第一信号,并将所述第一信号转换为第二通讯协 议的第二信号在其输出端输出; 切换电路,输入端用于接收所述第一信号,且与所述转换电路的输出端连接,所述 切换电路用于根据切换控制信号选择所接入的所述第一信号或所述第二信号在其输出端 输出; 通讯接口,与所述切换电路连接,所述通讯接口用于将所述切换电路输出的所述 第一信号或所述第二信号输出到负载。 在其中一个实施例中,第一通讯协议和第二通讯协议其中一个为串口通讯协议, 另一个为CAN总线通讯协议。 在其中一个实施例中,所述切换电路先输出所述第一信号和负载通讯一次,如果 通讯握手成功,则使所述转换电路进入休眠状态;如果握手不成功,所述转换电路将所述第 一信号转换为第二通讯协议的第二信号,所述切换电路将切换至输出所述第二信号到负 载。 在其中一个实施例中,所述切换电路包括至少两个单刀双掷模拟开关和用于控制 所述单刀双掷模拟开关切换的控制端,每个单刀双掷模拟开关的两个输入端的其中一个用 于接收所述第一信号,另一个与所述转换电路连接,接入所述第二信号。 在其中一个实施例中,所述单刀双掷模拟开关由CMOS器件制作。 在其中一个实施例中,所述切换电路为2通道以上的CMOS开关芯片。 在其中一个实施例中,所述转换电路包括一控制器,所述切换电路的控制端与所 述控制器连接。 在其中一个实施例中,所述控制器为ARM微控制器。 本申请实施例的第二方面提了一种机器人设备,包括主控板和多个舵机,以及上 3 CN 111614625 A 说 明 书 2/3 页 述的通讯协议转换电路,所述主控板通过所述通讯协议转换电路与各个舵机通讯连接。 上述的通讯电路通过切换电路控制输出到负载的信号满足不同通讯协议,应用在 机器人设备时,不同通讯协议的舵机可以进行交叉使用,减少专用通讯协议芯片的使用,减 少舵机的种类的开发周期,降低成本,增加不同机器人之间的通讯的兼容性,可以实现一个 机器人不同通讯类型的舵机相互置换。 附图说明 图1为本申请一实施例提供的通讯协议转换电路的结构示意图; 图2为图1所示的通讯电路中转换电路的示例电路原理图; 图3为图1所示的通讯电路中切换电路的示例电路原理图; 图4为图1所示的通讯电路中切换电路的内部电路的示例电路原理图; 图5为图1所示的通讯电路中通讯接口的示例电路原理图;











