
技术摘要:
本发明公开了冷连轧机故障特征识别方法、系统、装置及介质,方法包括:采集轧机位移信号;对所述轧机位移信号进行奇异值分解,得到奇异值谱和奇异值差分谱;根据所述奇异值差分谱获取无随机噪声的降噪信号;根据所述奇异值谱从所述降噪信号中提取直流主分量;根据所述 全部
背景技术:
随着科学技术不断进步,冶金设备日益向高负载、高自动化、高智能化方向发展, 由设备故障所导致事故的严重程度也大幅增加。如何及时发现隐患并加以消除以保证冶金 设备安全运行已成为业界迫切需要解决的重大问题。常见的冷连轧机故障包括:轧机轧辊 轴轴向窜动、锥齿轮打齿、轧辊轴断、联轴器脱开及锥齿轮脱开等。冷连轧机状态监测与故 障诊断装置可有效监测轧机设备的运行状态信息并进行故障识别,避免因故障扩大而带来 的巨大经济损失。现有的故障诊断中,因作业现场电磁情况复杂导致采集的冷连轧机信号 中同时存在随机噪声干扰和电源谐波噪声干扰,常规噪声抑制方法难以取得理想效果,会 存在对真实运行状态的误判。因此抑制轧机信号的随机噪声和电源谐波噪声干扰是冷连轧 机信号处理的重要内容。 现有技术中,可以采用奇异值分解方法实现轧机信号的噪声抑制。下面着重说明 采用奇异值分解方法实现噪声抑制的过程。 假设采集的位移信号X为: X={x1,x2,…,xN} (1) 将位移信号构造为m×n维的Hankel矩阵A: 通常当N为偶数时取m=N/2,n=N/2 1,当N为奇数时取m=(N 1)/2,n=(N 1)/2。 对实矩阵A进行奇异值分解生成正交矩阵U∈Rm×m和V∈Rn×n使得下式成立: A=UΛVT (3) 其中Λ为对角阵、r为Λ的秩,r≤min(m,n),非零对角元素σi称为A的奇异值。 因Λ为对角阵,(3)式可表示为r个秩为1的m×n阶子矩阵和的形式,如式(4)所示: 式中ui和vi分别称为矩阵的第i个左奇异向量和右奇异向量,σi为矩阵A的第i个奇 异值。 因此应用奇异值分解方法进行信号噪声抑制就是将全部奇异值分为两部分,一部 分是反映噪声的较小奇异值,另一部分是反映有用信号特征的较大奇异值,然后将较小奇 异值部分置零并保留较大奇异值部分,达到噪声抑制和特征提取的目的。奇异值分解方法 实际上就是选择合适的阶次k值进行重构,重构阶次k的选择至关重要,阶次值过小会使得 4 CN 111611870 A 说 明 书 2/6 页 信号失真严重,其值过大则导致较多的噪声。 但是上述现有奇异值分解方法的降噪效果并不好,主要表现为两点:一是现有方 式只能处理较为理想的信号类型,但是因为轧机工作现场环境恶劣,所采集信号会受到各 种复杂因素的影响,如果简单地将奇异值划分为有用信号特征的较大奇异值和和反映噪声 的较小奇异值两类会产生较大误差;二是电源谐波同轧机有用信号交织在一起而难以分 开,因而目前现在的奇异值分解方法并不能准确地完成轧机故障特征信号的识别。
技术实现要素:
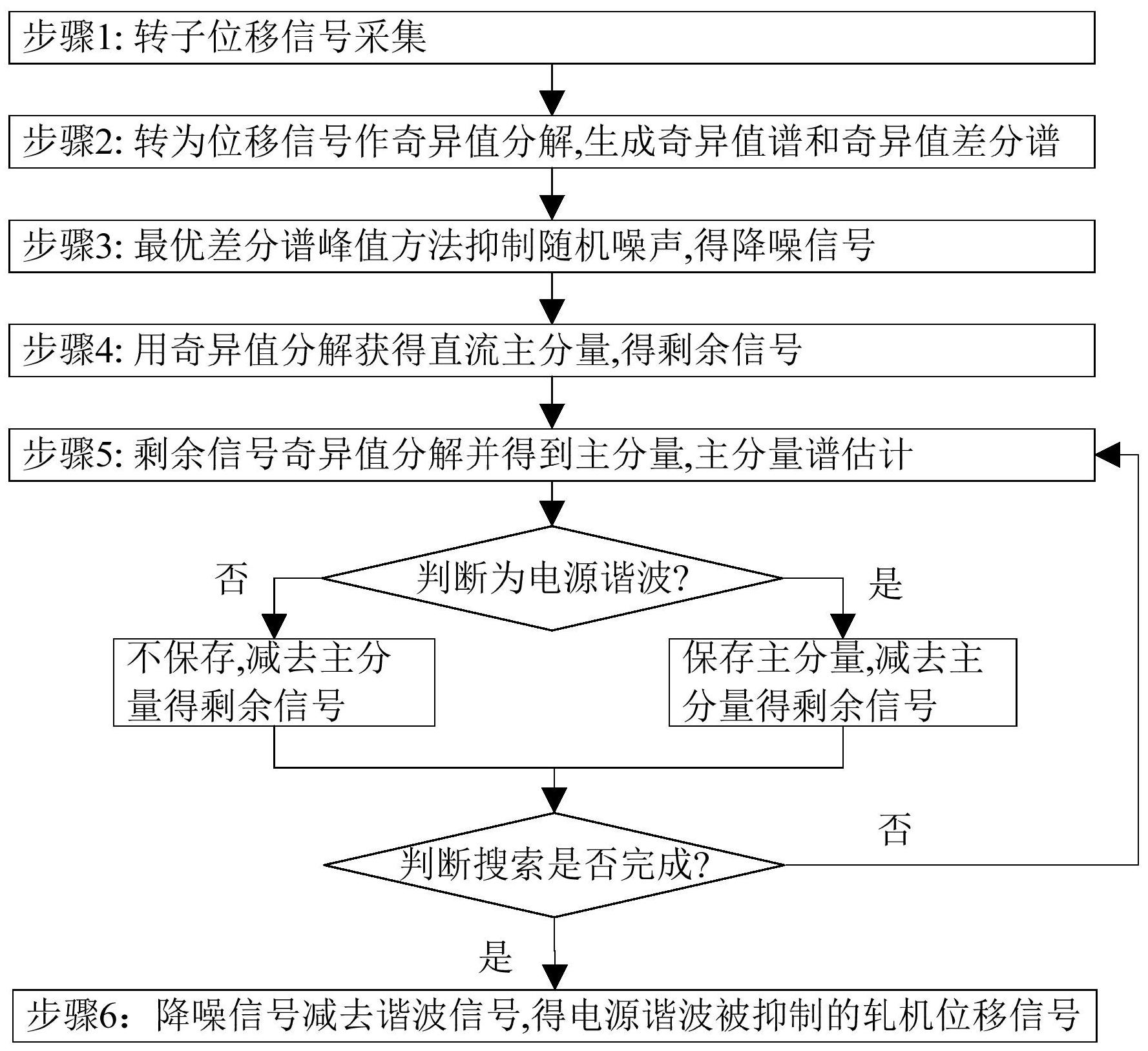
有鉴于此,本发明实施例提供一种高准确度的冷连轧机故障特征识别方法、系统、 装置及介质。 本发明的第一方面提供了冷连轧机故障特征识别方法,包括: 采集轧机位移信号; 根据所述轧机位移信号进行奇异值分解,得到奇异值谱和奇异值差分谱; 根据所述奇异值差分谱获取无随机噪声的降噪信号; 根据所述奇异值谱从所述降噪信号中提取第一主分量; 根据所述降噪信号和所述第一主分量,计算剩余信号; 根据所述奇异值谱从所述剩余信号中提取第二主分量; 根据所述降噪信号、第一主分量和第二主分量,确定电源基波及三次谐波被抑制 的轧机位移信号。 在一些实施例中,根据所述轧机位移信号进行奇异值分解之前,还包括以下步骤: 将所述轧机位移信号构造为位移信号矩阵。 在一些实施例中,所述根据所述奇异值差分谱获取无随机噪声的降噪信号,具体 为: 采用最优差分谱峰值方法抑制随机噪声,得到无随机噪声的降噪信号。 在一些实施例中,所述根据所述降噪信号和所述第一主分量,计算剩余信号这一 步骤,具体为: 用奇异值分解提取直流主分量,由降噪信号减去主分量得到剩余信号。 在一些实施例中,所述根据所述奇异值谱从所述剩余信号中提取第二主分量这一 步骤,包括: 以递归方式用奇异值分解方法从剩余信号中提取第二主分量,具体为: 根据提取到的主分量频谱特征判断当前主分量是否为基波和三次谐波,若是,则 保存当前主分量,并用剩余信号减去所述当前主分量后得到新的剩余信号;直至完成对所 有剩余信号的主分量提取。 在一些实施例中,所述根据所述降噪信号、第一主分量和第二主分量,确定电源基 波及三次谐波被抑制的轧机位移信号这一步骤,具体为: 将所述降噪信号减去所述基波和三次谐波,得到抑制电源基波和三次谐波的轧机 位移信号。 根据本发明的第二方面,还提供了一种冷连轧机故障特征识别系统,包括: 信号采集模块,用于采集轧机位移信号; 5 CN 111611870 A 说 明 书 3/6 页 信号处理模块,用于对所述轧机位移信号进行奇异值分解,依据主分量频谱特征 提取基波主分量和三次谐波主分量; 识别模块,对电源基波和三次谐波得以抑制的轧机位移信号进行识别,从而判断 冷连轧机的工作状态。 根据本发明的第三方面,还提供了一种装置,包括处理器以及存储器; 所述存储器用于存储程序; 所述处理器用于根据所述程序执行如本发明第一方面所述的方法。 根据本发明的第四方面,还提供了一种存储介质,所述存储介质存储有程序,所述 程序被处理器执行完成如本发明第一方面所述的方法。 本发明的实施例首先对轧机位移信号进行奇异值分解,得到奇异值谱和奇异值差 分谱;然后根据最优奇异值差分谱获取无随机噪声的降噪信号;递归方式提取主分量并依 据其频谱特征判断是否为基波和三次谐波;最后识别得到抑制电源基波和三次谐波的轧机 位移信号。本发明提高了轧机故障特征信号的信噪比和识别准确率。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图。 图1为本发明的整体步骤流程图; 图2为本发明的采集轧机位移信号的波形图和频谱图; 图3为本发明的降噪信号的波形图和频谱图; 图4为本发明实施例的直流分量xD(t)波形图及频谱图; 图5为本发明实施例的主分量x1(t)的波形图及频谱图; 图6为本发明实施例的主分量x2(t)的波形图及频谱图; 图7为本发明实施例的主分量x3(t)的波形图及频谱图; 图8为本发明实施例的主分量x4(t)的波形图及频谱图; 图9为本发明抑制电源基波和三次谐波的轧机位移信号波形图和频谱图。











