
技术摘要:
本申请提供了一种三维地图的构建方法、扫地机器人及电子设备。该方法包括:步骤A,基于获取的激光点云数据通过相应的点云匹配算法确定扫地机器人在当前位置的位姿信息,步骤B,基于确定的扫地机器人在当前位置的位姿信息与扫地机器人在当前位置获取的深度信息构建环境 全部
背景技术:
扫地机器人作为一种能够自动对待清扫区域进行清扫的智能电器,可以代替人对 地面进行清扫,减少了人的家务负担,越来越受到人们的认可。扫地机器人的应用环境空间 的地图构建是扫地机器人执行清扫工作的基础,如何构建扫地机器人的应用环境空间的地 图成为一个关键问题。 同时定位与建图(Simultaneous Localization and Mapping,SLAM)技术要解决 的问题是:将一个机器人放入未知环境中的未知位置,是否有办法让机器人一边移动一边 逐步描绘出与此环境完全一致的地图。目前,扫地机器人的应用环境空间的地图的构建是 通过基于激光雷达的SLAM技术实现的,即仅根据通过扫地机器人的激光雷达得到的激光点 云数据进行建图。然而,现有的仅基于激光雷达的SLAM建图方法,激光雷达仅能探测2D平面 的障碍物信息,探测不到障碍物的垂直方向的信息,构建的地图为二维地图,所提供的环境 空间的信息有限,且对于一些特殊的障碍物(如镂空结构的桌椅等),则不能通过激光雷达 进行有效探测处理。因此,现有仅基于激光雷达的SLAM建图方法,存在构建的地图提供的信 息少且建图准确性低的问题。
技术实现要素:
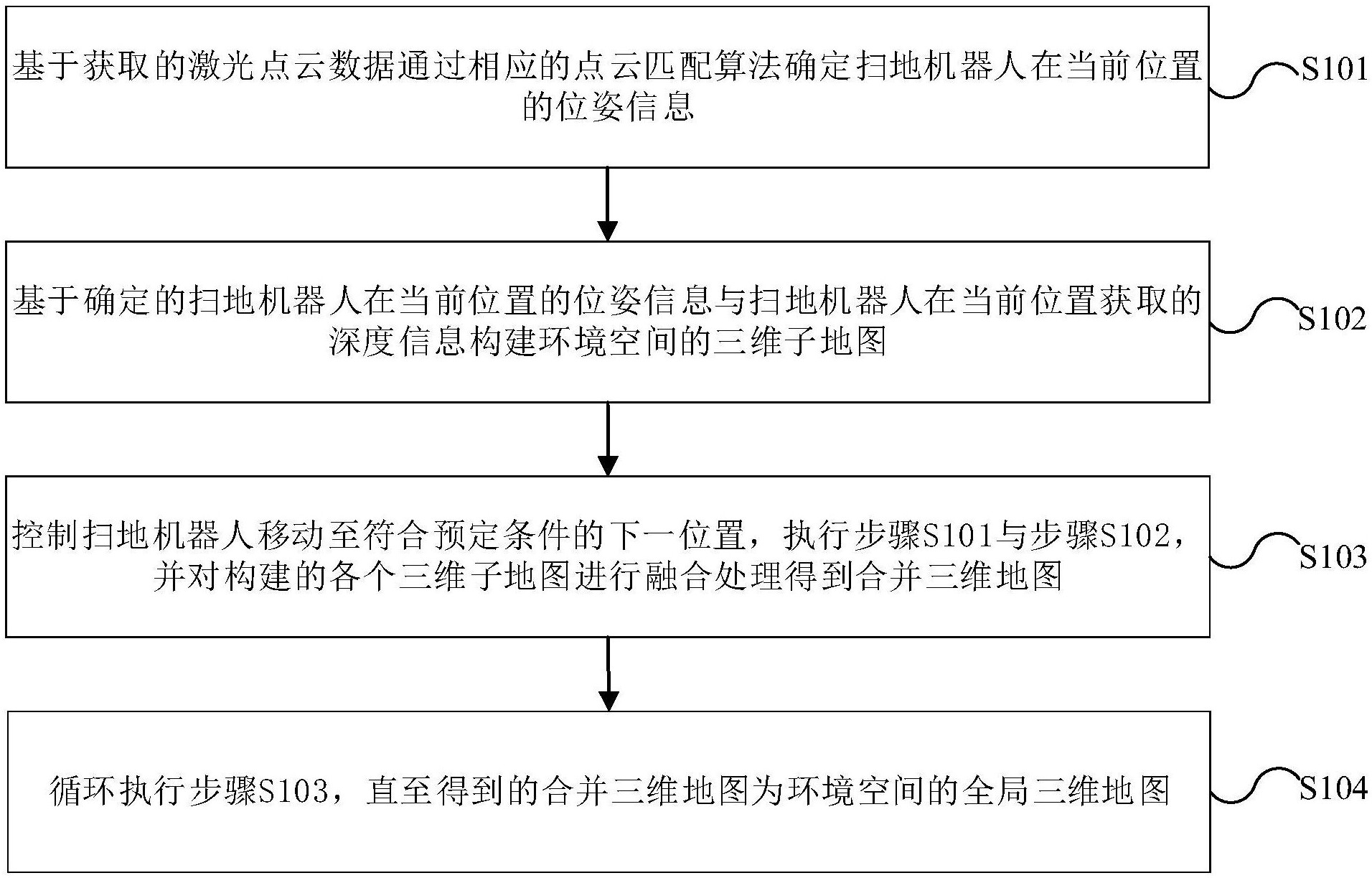
本申请提供了一种三维地图构建方法、扫地机器人及电子设备,用于提升构建的 环境空间的地图包含的信息的丰富性以及提升构建的地图的准确性,本申请采用的技术方 案如下: 第一方面,本申请提供了一种三维地图的构建方法,该方法包括: 步骤A,基于获取的激光点云数据通过相应的点云匹配算法确定扫地机器人在当 前位置的位姿信息; 步骤B,基于确定的扫地机器人在当前位置的位姿信息与扫地机器人在当前位置 获取的深度信息构建环境空间的三维子地图; 步骤C,控制扫地机器人移动至符合预定条件的下一位置,执行步骤A与步骤B,并 对构建的各个三维子地图进行融合处理得到合并三维地图; 循环执行步骤C,直至得到的合并三维地图为环境空间的全局三维地图。 可选地,相应的点云匹配算法包括以下任一种:基于迭代最近邻算法;基于概率模 型的相关性匹配算法。 可选地,控制扫地机器人移动至符合预定条件的下一位置,包括: 基于三维子地图或合并三维地图确定扫地机器人的移动信息,移动信息包括移动 方向信息与移动距离信息; 4 CN 111609853 A 说 明 书 2/11 页 基于移动信息控制扫地机器人移动至符合预定条件的下一位置。 进一步地,该方法还包括: 基于获取的激光点云数据通过同时定位与建图SLAM算法构建环境空间的二维子 地图; 控制扫地机器人移动至符合预定条件的下一位置,包括: 基于二维子地图确定扫地机器人的移动信息,移动信息包括移动方向信息与移动 距离信息; 基于移动信息控制扫地机器人移动至符合预定条件的下一位置。 进一步地,该方法还包括: 基于全局三维地图规划扫地机器人的工作路径,工作路径包括扫地机器人到达清 扫目标区域的路线和/或扫地机器人对清扫目标区域进行清扫的路线。 可选地,全局三维地图包括各个障碍物和/或悬崖的三维信息,基于全局三维地图 规划扫地机的工作路径,包括: 基于各个障碍物和/或悬崖的三维信息确定扫地机器人通过各个障碍物和/或悬 崖的方式; 基于确定的通过各个障碍物和/或悬崖的方式规划扫地机器人的工作路径。 第二方面,提供了一种扫地机器人,该扫地机器人包括:深度相机、激光雷达传感 器以及构建装置; 深度相机,用于获取扫地机器人在当前位置的深度信息; 激光雷达传感器,用于获取激光点云数据; 构建装置包括: 确定模块,用于基于通过激光雷达传感器获取的激光点云数据通过相应的点云匹 配算法确定扫地机器人在当前位置的位姿信息; 第一构建模块,用于基于确定模块确定的扫地机器人在当前位置的位姿信息与通 过深度相机获取的扫地机器人在当前位置的深度信息构建环境空间的三维子地图; 控制模块,用于控制扫地机器人移动至符合预定条件的下一位置,执行确定模块 与第一构建模块的执行过程,并对构建的各个三维子地图进行融合处理得到合并三维地 图; 循环模块,用于循环执行控制模块的执行过程,直至得到的合并三维地图为环境 空间的全局三维地图。 可选地,相应的点云匹配算法包括以下任一种:基于迭代最近邻算法;基于概率模 型的相关性匹配算法。 可选地,控制模块包括第一确定单元与控制单元; 第一确定单元,用于基于三维子地图或合并三维地图确定扫地机器人的移动信 息,移动信息包括移动方向信息与移动距离信息; 控制单元,用于基于移动信息控制扫地机器人移动至符合预定条件的下一位置。 进一步地,构建装置还包括第二构建模块; 第二构建模块,用于基于获取的激光点云数据通过同时定位与建图SLAM算法构建 环境空间的二维子地图; 5 CN 111609853 A 说 明 书 3/11 页 控制模块,用于基于二维子地图确定扫地机器人的移动信息,移动信息包括移动 方向信息与移动距离信息,以及用于基于移动信息控制扫地机器人移动至符合预定条件的 下一位置。 进一步地,构建装置还包括规划模块; 规划模块,用于基于全局三维地图规划扫地机器人的工作路径,工作路径包括扫 地机器人到达清扫目标区域的路线和/或扫地机器人对清扫目标区域进行清扫的路线。 可选地,全局三维地图包括各个障碍物和/或悬崖的三维信息,规划模块包括第二 确定单元与规划单元; 第二确定单元,用于基于各个障碍物和/或悬崖的三维信息确定扫地机器人通过 各个障碍物和/或悬崖的方式; 规划单元,用于基于第二确定单元确定的通过各个障碍物和/或悬崖的方式规划 扫地机器人的工作路径。 第三方面,本申请提供了一种电子设备,该电子设备包括:处理器和存储器; 存储器,用于存储操作指令; 处理器,用于通过调用操作指令,执行如本申请的第一方面的任一实施方式中所 示的三维地图的构建方法。 第四方面,本申请提供了一种计算机可读存储介质,其上存储有计算机程序,该程 序被处理器执行时实现本申请的第一方面的任一实施方式中所示的三维地图的构建方法。 本申请提供了一种三维地图构建方法、扫地机器人及电子设备,与现有技术仅基 于激光雷达进行SLAM相比,本申请通过步骤A,基于获取的激光点云数据通过相应的点云匹 配算法确定扫地机器人在当前位置的位姿信息,步骤B,基于确定的扫地机器人在当前位置 的位姿信息与扫地机器人在当前位置获取的深度信息构建环境空间的三维子地图,步骤C, 控制扫地机器人移动至符合预定条件的下一位置,执行步骤A与步骤B,并对构建的各个三 维子地图进行融合处理得到合并三维地图,循环执行步骤C,直至得到的合并三维地图为环 境空间的全局三维地图。即本申请基于获取的深度信息与激光点云数据构建环境空间的三 维地图,较构建的二维地图相比三维地图包含了障碍物在垂直方向的信息,因此三维地图 较现有的仅基于激光雷达构建的二维地图包含了更多的环境空间的信息,与此同时,通过 获取空间环境的深度信息的深度相机,能够探测到镂空结构的桌椅等通过激光雷达不能探 测到的障碍物的信息,从而提升了构建的环境空间的地图的准确性。 本申请附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变 得明显,或通过本申请的实践了解到。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对本申请实施例描述中所 需要使用的附图作简单地介绍。 图1为本申请实施例提供的一种三维地图的构建方法的流程示意图; 图2为本申请实施例提供的一种扫地机器人的结构示意图; 图3为本申请实施例提供的另一种扫地机器人的结构示意图; 图4为本申请实施例提供的一种电子设备的结构示意图。 6 CN 111609853 A 说 明 书 4/11 页











