
技术摘要:
本发明一种基于镇定控制的欠驱动水面艇自动靠泊方法,包括如下步骤:S1,构建水面艇三自由度运动数学模型;S2,将所建立的数学模型展开并进行微分同胚变换;S3,采用状态反馈线性化对数学模型进行反馈变换;S4,根据变换后的系统进行控制器的设计。本发明将欠驱动船舶 全部
背景技术:
近年来,智能船舶作为控制领域的一个研究热点引起了学者的广泛关注,目前针 对智能车辆的自动泊车技术已经取得较快的发展,而关于水面艇自动靠泊的研究相对较 少。现今水面艇的离靠泊多由人工操控完成,依靠船员对水面艇位置、航向航速和航向角等 信息做出判断,容易出现人为控制决策的失误或控制精度不足等问题,从而造成不必要的 损失。因此,研究水面艇的自动靠泊方法具有十分重要的现实意义和实际价值。 现阶段,用于海上航行的水面艇多为欠驱动水面艇,欠驱动水面艇是指控制系统 的输入维数小于自由度数的水面艇,目前常见的水面艇主要采用螺旋桨和船舵作为控制装 置。对于水平面的航向控制,此类型的水面艇是全驱动模型,而对于水平面内的位置和姿态 控制则为欠驱动模型。由于这类水面艇在横向上没有推进装置,只能依靠纵向的推进器和 船舵进行驱动,无法像全驱动水面艇能够实现可靠的侧移控制,具有较高的控制难度。 目前关于欠驱动水面艇自动靠泊的研究较少,由于控制模型和控制任务的复杂 性,实现稳定、可靠的自动靠泊是十分困难的。总之,自动靠泊领域的研究不仅对于非线性 系统控制方法具有挑战性,也对于实际应用具有很高的价值。 由于水面艇在海洋中的模型较为复杂,目前自动靠泊领域主要通过神经网络的方 式建立水面艇运动的数学模型,然而该方法的可行性较低。一方面,在进行神经网络建模前 需要大量的训练数据,高成本的海上实验难以满足其对于数据的需要;另一方面,对于已经 建立的数学模型,神经网络方法并不具有解释其推理过程和推理依据的能力,这无论对于 理论要求还是实际工程都是不可接受的。 在船舶海洋实际工程中,欠驱动水面艇的自动靠泊问题可归结为镇定控制律的设 计问题。在欠驱动水面艇的镇定控制中,需要使水面艇在水平面内到达并保持在预先设定 的位置和艏向角上,因此在镇定过程中不仅要实现位置和艏向角的镇定,还要保证其他物 理量例如横向速度、纵向速度以及艏向角速度的镇定。基于以上背景,本发明基于镇定控制 理论提出一种可靠的自动靠泊方法。 通过对现有方法的探索,并未发现类似专利。因此针对欠驱动水面艇,提出一种基 于镇定控制的欠驱动水面艇自动靠泊方法是有一定前景的。
技术实现要素:
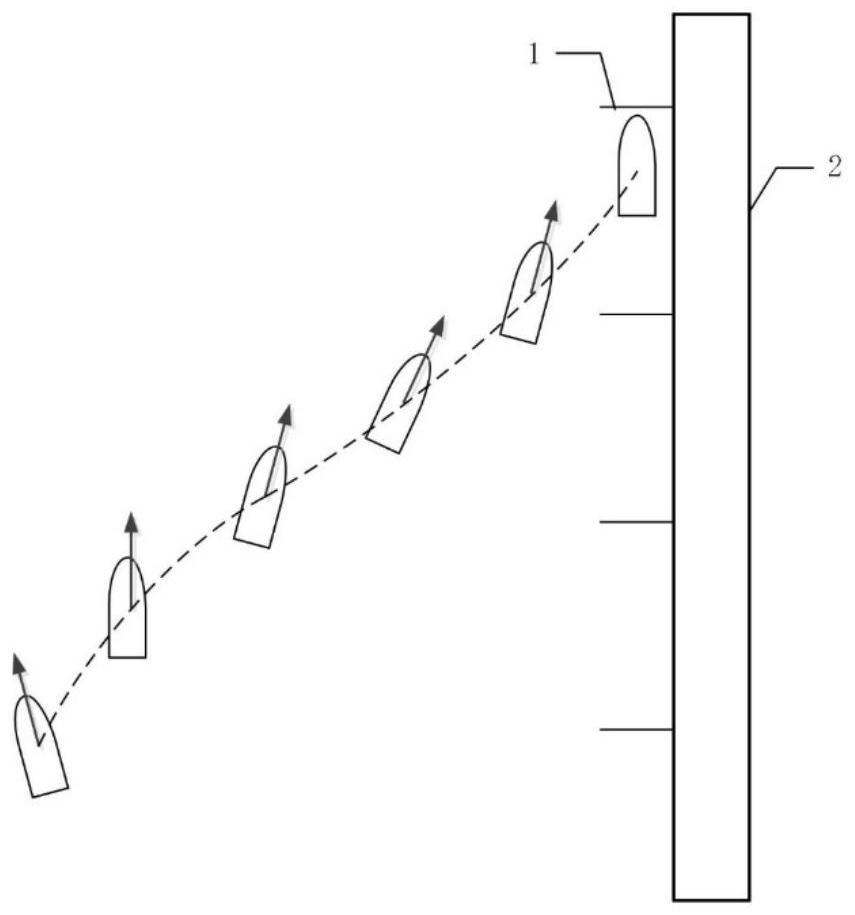
本发明的目的是为了实现欠驱动水面艇的全局渐进点镇定控制,从而实现其自动 靠泊的功能而提供了一种基于镇定控制的欠驱动水面艇自动靠泊方法。 本发明的目的是这样实现的: 一种基于镇定控制的欠驱动水面艇自动靠泊方法,包括如下步骤: 4 CN 111596670 A 说 明 书 2/8 页 S1,构建水面艇三自由度运动数学模型; S2,将所建立的数学模型展开并进行微分同胚变换; S3,采用状态反馈线性化对数学模型进行反馈变换; S4,根据变换后的系统进行控制器的设计 本发明还包括这样一些结构特征: 所述水面艇三自由度运动数学模型的展开式为: 其中,m11、m22和m33为水面艇的附加质量系数;d11、d22和d33为水面艇的阻尼系数;u、 v和r分别为水面艇的纵向速度、横向速度和转向角速度;τ1和τ3分别为水面艇的推进力矩和 转向力矩;x、y和ψ为水面艇的纵向位置、横向位置和艏向角; 所述微分同胚变换后的数学模型为: 其中z=[z1 z2 z3]T为微分同胚变换后的位置坐标; 状态反馈线性化后的动态系统为: 其中A=m11/m22,B=d22/m22, 5 CN 111596670 A 说 明 书 3/8 页 所设计的控制律为: 与现有技术相比,本发明的有益效果是: 本发明将欠驱动船舶的动态系统转换成一种拓展的链式结构,最终实现了欠驱动 水面艇的全局渐进点镇定控制,从而实现其自动靠泊的功能; 本发明能对欠驱动水面艇实现较为精确、稳定的控制,能够满足欠驱动水面艇控 制系统的全局渐进稳定性,并使水面艇的位置、速度和艏向角等物理量指数收敛。 附图说明 图1是本发明中水面艇自动靠泊过程示意图; 图2是本发明中微分同胚变换物理意义图; 图3是本发明一实施例水面艇水平面内位置仿真效果图; 图4是本发明一实施例水面艇艏向角仿真效果图; 图5是本发明一实施例水面艇艏向角速度仿真效果图; 图6是本发明一实施例水面艇的纵向速度和横向速度仿真效果图; 图7是本发明一实施例船舶纵向推力仿真效果图; 图8是本发明一实施例船舶转向力矩仿真效果图; 图9是本发明一实施例船舶姿态和轨迹仿真效果图。











