
技术摘要:
本发明公开了一种蓄电池用整形机械手,包括机架、以可垂直于横向方向转动的方式安装于机架上的翻转机械手以及以可横向滑动的方式安装于机架上的横向整形组件,所述翻转机械手用于接收码垛件并对码垛件纵向整形,翻转机械手转动将码垛件送至横向整形组件处对码垛件横向 全部
背景技术:
蓄电池中尤其是铅酸蓄电池中常用到极板或分片机后段,上述零部件需要码垛和 堆垛,蓄电池极板自动码垛堆垛系统是实现蓄电池生产全程机械化、自动化的关键设备。目 前应用于连续涂板线的自动码垛堆垛系统主要有气力式(真空吸附极板)和机械式(机械叠 片)两种,无论哪种方式,最终码垛的极板垛均存在外形不规则的问题,无法实现机械手的 自动堆垛,配合上述码垛堆垛系统需要人工对码垛后的极板垛进行整形再堆垛。由于连续 涂板线生产效率高,通常需4-5名工人同步堆垛才可满足生产工艺要求,人工堆垛劳动强度 大,人工成本高,而且降低了整条生产线的生产效率。 因此,为解决以上问题,提出一种蓄电池生产线中用的整形机械手,对经自动码垛 堆垛系统码垛后的极板垛或者分片机后段垛进行整形处理,输出外形规则的极板垛以便实 现机械手自动堆垛从而降低人工强度,降低企业制造成本。
技术实现要素:
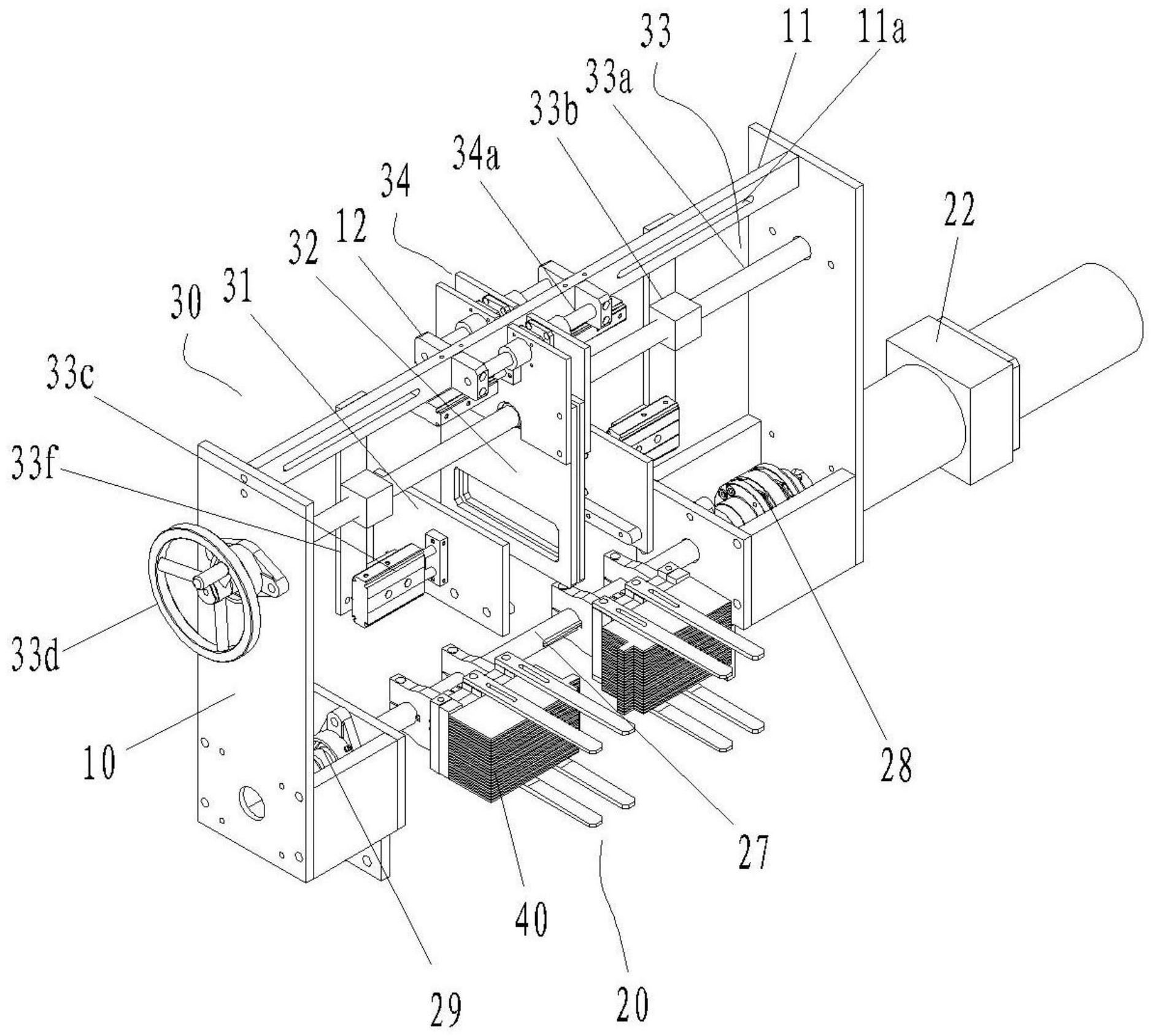
有鉴于此,本发明提供一种蓄电池用整形机械手,对经自动码垛堆垛系统码垛后 的极板垛或者分片机后段垛进行整形处理,输出外形规则的极板垛以便实现机械手自动堆 垛从而降低人工强度,降低企业制造成本。 本发明的蓄电池用整形机械手,包括机架、以可垂直于横向方向转动的方式安装 于机架上的翻转机械手以及以可横向滑动的方式安装于机架上的横向整形组件,所述翻转 机械手用于接收码垛件并对码垛件纵向整形,翻转机械手转动将码垛件送至横向整形组件 处对码垛件横向整形。 进一步,所述翻转机械手包括与机架转动配合的转动座、驱动转动座转动的机械 手驱动件、安装于转动座上用于支撑码垛件的下挡板以及用于对码垛件顶部限位的上挡 板,上挡板和下挡板的横向尺寸小于码垛件的横向尺寸。 进一步,所述翻转机械手还包括安装于转动座上的纵向整形件以及纵向驱动件, 所述纵向整形件以可纵向滑动的方式安装于转动座上,所述纵向驱动件安装于转动座上并 驱动纵向整形件纵向滑动从而纵向推动码垛件实现纵向整形。 进一步,所述横向整形组件包括可横向滑动安装于机架上的横向整形件Ⅰ和横向 整形件Ⅱ以及驱动横向整形件Ⅰ和横向整形件Ⅱ横向滑动的横向驱动组件,所述横向整形 件Ⅰ以及横向整形件Ⅱ之间的整形空间以垂直于横向的方向正对翻转机械手。 进一步,翻转机械手至少设置一组,每组中包括两个横向并列设置的翻转机械手, 每组翻转机械手对应一个横向整形组件,所述横向整形组件包括两个横向整形件Ⅰ以及两 个横向整形件Ⅱ,所述两个横向整形件Ⅱ位于两个横向整形件Ⅰ之间并构成两个横向并列 3 CN 111591776 A 说 明 书 2/5 页 设置的整形空间。 进一步,每组翻转机械手配套设置一个横向驱动组件,所述横向驱动组件包括用 于同步驱动两个横向整形件Ⅰ滑动的横向驱动件Ⅰ以及用于驱动横向整形件Ⅱ滑动的横向 驱动件Ⅱ,所述横向驱动件Ⅰ包括横向安装并与机架转动配合的螺杆,所述两个横向整形件 Ⅰ螺纹连接于螺杆上,螺杆与两个横向整形件Ⅰ啮合处的螺纹旋向相反。 进一步,所述横向驱动件Ⅱ包括横向安装于机架上的导向杆以及固定于机架上用 于驱动横向整形件Ⅱ横向滑动的动力件Ⅱ,所述横向整形件Ⅱ可横向滑动套于导向杆上。 进一步,所述横向驱动件Ⅰ还包括与各横向整形件Ⅰ一一匹配的调整块以及连接于 整形块上的动力件Ⅰ,所述调整块螺纹连接于螺杆上,动力件Ⅰ输出端连接于横向整形件Ⅰ 上。 进一步,所述横向驱动件Ⅰ还包括手柄,所述手柄连接于螺杆的一端。 进一步,所述导向杆至少设置两根,横向驱动件Ⅱ还包括可轴向外套于导向杆上 的自润滑轴承以及连接于自润滑轴承上的安装板,所述横向整形件Ⅱ连接于安装板上。 本发明的有益效果: 本发明可对码垛件进行各个方向的整形处理,输出外形规则的码垛件,以便实现 堆垛机械手的自动堆垛,降低人工强度,提高连续涂板线生产效率,降低企业生产成本; 本发明翻转机械手在转动过程中使得码垛件滑动至翻转机械手最内侧,尤其翻转 机械手向上转动至竖直方向时,码垛件滑动贴至转动座上可实现被动纵向整形,另外纵向 整形件被驱动纵向滑动时,可推动码垛件实现对码垛件纵向的主动整形,该结构配合翻转 机械手转动过程,可实现对码垛件主动以及被动的纵向整形,大大提高码垛件的整形质量; 横向整形件Ⅰ和横向整形件Ⅱ横向滑动时对码垛件形成横向夹持,可对码垛件进行横向整 形,该结构结合翻转机械手的转动可动态的调整码垛件的方位,利于在不同方位对码垛件 进行整形,保证码垛件中各个部件可相对滑动进而保证整形质量。 附图说明 下面结合附图和实施例对本发明作进一步描述。 图1为本发明结构示意图; 图2为正视结构示意图; 图3为翻转机械手结构示意图; 图4为横向驱动件Ⅱ局部结构示意图; 图5为横向驱动件Ⅰ局部结构示意图;











