
技术摘要:
本发明公开了一种旋转倒立摆的迭代反馈整定控制及其鲁棒优化方法,涉及机器人优化控制领域,该方法包括:基于倒立摆机械和硬件结构建立旋转倒立摆的拉格朗日和状态空间数学模型;设计旋转倒立摆迭代反馈整定双闭环控制器;针对迭代反馈整定PD控制器进行算法的收敛性分 全部
背景技术:
旋转倒立摆作为一个典型的欠驱动非线性系统,具有不稳定、多变量、强耦合等特 点,并很好的将数学、电学和力学这三门基础学科融合起来。因此,对于倒立摆系统的控制 不仅意义重大,而且极具挑战,深受世界各地控制学科的专家学者的重视。除此之外,旋转 倒立摆作为机器人、火箭飞行姿态等许多控制对象的最简单模型,是验证各种控制理论策 略正确性的理想实验平台,并为控制理论和工程实际应用搭建了一个桥梁。同时作为一种 实验装置,结构简单并且控制效果直观,是验证各种控制方法的理想实验平台。其中枢轴为 旋转移动的类型又被称为旋转倒立摆,相比于直线型倒立摆通过小车运动控制摆杆,其通 过旋臂带动摆杆旋转来保持直立状态,非线性更强。将旋转倒立摆作为被控对象,能够检验 迭代反馈整定算法是否具有针对多状态、非线性和绝对不稳定控制系统的优化能力。 作为一种典型的被控模型,对旋转倒立摆系统的控制研究几乎涉及到了绝大部分 的控制方法,其中在传统控制领域主要有状态反馈控制、滑膜控制和PID控制等。但这些方 法都存在一些局限性,例如状态反馈控制必须要有被控系统的精确模型,在模型精确度不 足的情况下难以实现对倒立摆尤其是高阶倒立摆的稳定控制;而滑膜控制在旋转倒立摆切 换状态时引起的抖振制约了其应用;PID控制依然是最为普遍的控制方式,其中多闭环PID 对阶次较低的旋转倒立摆的控制效果良好,但多闭环PID相比于基础的PID,其参数整定较 为复杂。
技术实现要素:
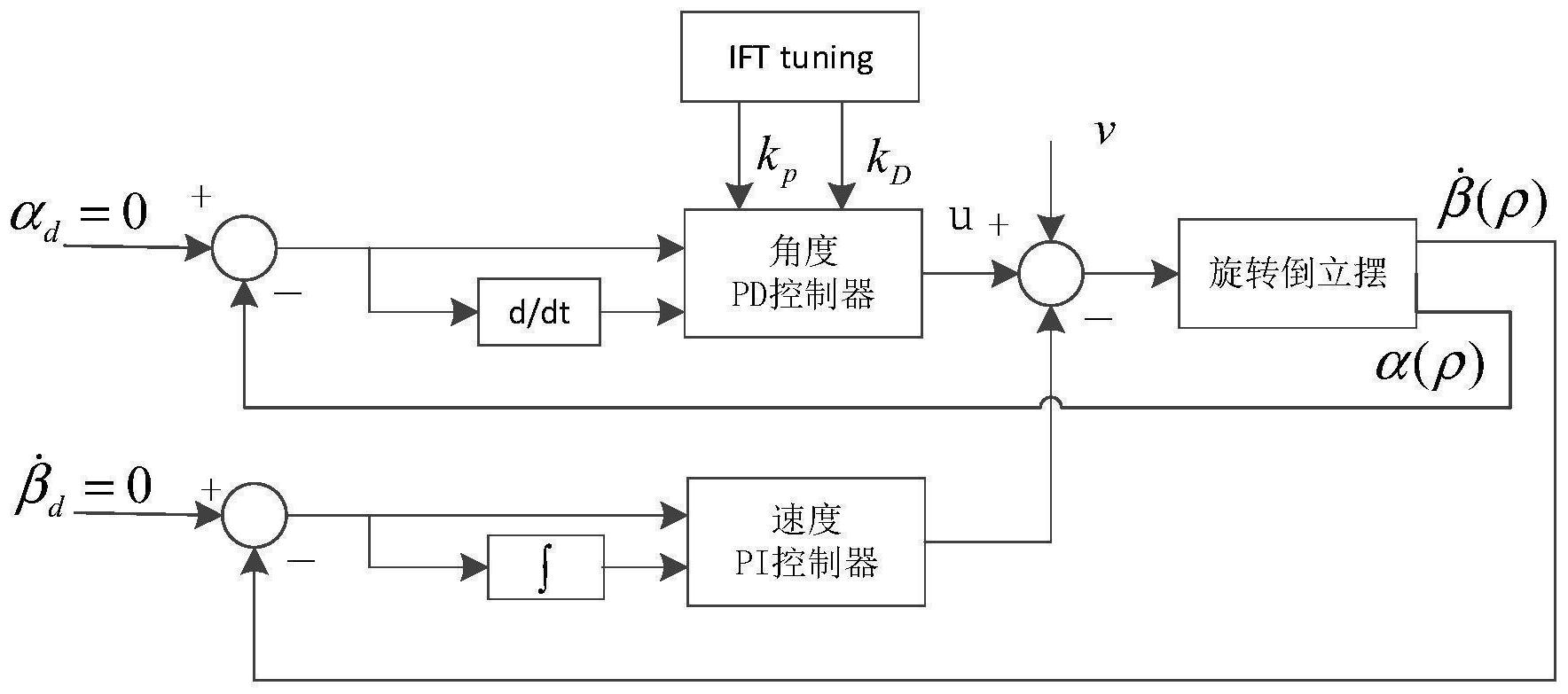
本发明人针对上述问题及技术需求,提出了一种旋转倒立摆的迭代反馈整定控制 及其鲁棒优化方法,首先建立起基于双闭环控制的旋转倒立摆实验平台,并再此基础上使 用迭代反馈整定算法优化旋转倒立摆系统的角度PD控制器,在PD控制策略框架下,基于IFT 算法的基本原理、参数最优化理论和实验整定方法,根据闭环系统的性能准则函数和输入、 输出信号自动整定PID控制器参数,运用Gauss-Newton算法得到PID控制器参数的最优值, 引入辅助因子不断迭代性能准则函数的权重因子达到改善系统鲁棒性的目的,最终实现对 旋转倒立摆的稳定控制。 本发明的技术方案如下: 一种旋转倒立摆的迭代反馈整定控制及其鲁棒优化方法,包括如下步骤: 第一步:建立旋转倒立摆的拉格朗日和状态空间模型; 旋转倒立摆系统包括底座、传动装置、摆杆及旋臂,底座用于保证摆杆摆动时机械 结构的稳定;旋臂末端连接摆杆,直流电机的旋转通过传动装置带动摆杆的运动;旋臂的角 度及角速度则通过直流电机自带的增量式旋转编码器获取;通过联轴器连接增量式旋转编 8 CN 111736471 A 说 明 书 2/16 页 码器与摆杆,带动增量式旋转编码器旋转从而获取摆杆的角度及角速度;在构建旋转倒立 摆的动力学模型中,忽略空气阻力、摩擦力及微小项以简化建模过程,把旋臂及摆杆视为均 匀的长杆,设摆杆处于稳定竖立时旋转倒立摆系统的势能为零; 摆杆偏离直立位置角度α时,旋臂通过旋转β带动摆杆趋于直立位置,因此旋臂末 端速度vm为: 其中,r1为旋臂旋转中心到与摆杆连接点的距离, 为旋臂旋转时角速度; 由于摆杆为均匀长杆,视摆杆为一质点则得到摆杆转动速度为vz为: 其中,L为摆杆长度, 为摆杆旋转时角速度; 将摆杆转动速度vz在旋臂末端速度vm垂直方向进行分解,并以摆杆旋转平面与地 面水平方向速度vr所指方向为正方向,得到: 在旋臂末端速度vm和地面水平方向速度vr的共同作用下,摆杆在水平方向上的速 度vb为: 摆杆的动能包含有旋转产生的转动动能以及在水平方向上移动产生的动能,另外 旋转倒立摆系统整体动能还包含有直流电机带动的旋臂的动能,因此得到旋转倒立摆系统 的整体动能V,令J1为摆杆的转动惯量,J2为旋臂的转动惯量,m为摆杆质量,并将式(4)及(5) 带入得到: 摆杆直立时设为零势能点,H为旋转倒立摆系统整体势能,E为拉格朗日函数,则偏 转α角度后势能降为: 拉格朗日函数E为: 9 CN 111736471 A 说 明 书 3/16 页 可知旋臂旋转带动摆杆运动,无外界能力输入,令Toutput为电机输出转矩,Beq为等 效粘性摩擦,得到拉格朗日方程为: 式(8)带入式(9)及(10)得到旋转倒立摆的非线性模型: 从在式(11)得到的旋转倒立摆的非线性模型中,其输入为直流电机转矩,但通常 情况下以直流电机电压为控制输入,因此接下来对直流电机进行建模,最终建立以直流电 机电压为输入的倒立摆非线性模型; 令Id为直流电机电流,Ed为反电动势,并考虑传动装置的效率和齿轮比值,KT为电 机转矩系数,KE为电机转速系数,Kg为旋臂与直流电机的齿轮比,ηg为齿轮传动效率,ηd为电 机效率,U为直流电机电压,R为电枢电阻,得到: Toutput=ηdηgKgKTId (13) 将式(12)、(13)带入式(11)中,得到以直流电机电压为输入的倒立摆非线性模型 为: 为了进一步建立旋转倒立摆的状态空间模型,需要将倒立摆非线性模型进行线性 化,注意到摆杆在稳摆控制中处于直立状态,因此摆杆角度较小,此时存在sinα≈α,cosα≈ 1,则得到旋转倒立摆线性模型为: 10 CN 111736471 A 说 明 书 4/16 页 接下来以旋转倒立摆线性模型为基础来建立旋转倒立摆的状态空间模型,为了简 化书写设置如下定义: b=J2 mr 21 (17) 将式(16)至(21)带入式(15)解得 与 为: 选取状态向量 其中β为旋臂旋转角度,输入为直流电机电压U,得 到旋转倒立摆的状态空间模型为: 其中由于摆杆及旋臂视为均匀长杆,则其转动惯量J1、J2可以得出: 其中,r2为旋臂长度,M旋臂质量,ρ为旋臂和摆杆的密度; 第二步:设计旋转倒立摆迭代反馈整定双闭环控制器; 针对旋转倒立摆的状态空间模型设计双闭环控制器,使用迭代反馈整定算法优化 角度PD控制器参数,若C(ρ)=[Cr(ρ)Cy(ρ)],Cr(ρ)、Cy(ρ)是线性时不变传递函数,G是被控 对象的传递函数,u(t)是控制器输出,r(t)是参考输入,y(t)是旋转倒立摆系统输出,v(t) 是均值为零的外部随机扰动,PID控制器参数为ρ=[KpKd],在此基础上反馈控制系统作用下 11 CN 111736471 A 说 明 书 5/16 页 的响应输出为: 为了简化书写,将T0(ρ)、S0(ρ)简写为T0、S0,定义yd是给定的期望输入信号,则期望 输出与实际输出之间的跟踪误差为: 对于控制器参数为ρ的固定结构PID控制器,通过最小化 以改善反馈控制系统 的跟踪控制效果,定义性能优化指标函数J(ρ)为: 其中Ly、Lu表示基于时间序列的滤波器,通常Ly=Lu=1,采样点个数为N,性能度量 的权重因子为λ;IFT算法是通过最小化性能优化指标函数J(ρ)直接求得系统的PID控制器 参数ρ,然后通过i次迭代逐步获取PID控制器参数ρ的最优值,ρi为ρ在第i次迭代中的值,在 每个迭代批次中,变量y(ρi)和u(ρi)关于控制器参数ρi的偏导数为: IFT算法通过在自由度控制系统中进行三次实验,以获得T0r,T0(r-y)的估计值,在 三次实验中,前两次用来估计信号T0,首先在第i次迭代中,第一次实验以r (1)i =r为输入的 参考信号,y(1)(ρi)为采样得到的控制系统的输出值;其次,以该两信号差值r-y(1)(ρi)为第 二次实验输入的参考信号r (2),采样得到y(2)i (ρi): 第三次实验用来估计信号T r,以r (3)0 i =r作为输入的参考信号: 根据三次实验的控制器输出值以及旋转倒立摆系统输出值得到 的无偏估 计,同理 可以也得到: 12 CN 111736471 A 说 明 书 6/16 页 基于实验数据的第i次迭代的性能优化指标函数J(ρi)的估计梯度为: 根据性能优化指标函数J(ρi)的估计梯度以及上一次迭代的PID控制器参数ρi使用 Gauss–Newton算法计算下一次迭代更新的ρi 1: 其中γi>0表示步长,Ri为正定Hessian矩阵表示优化搜索方向: 第三步:迭代反馈整定角度PD控制器的收敛性分析; 为保证算法的收敛性,条件1是保证性能优化指标函数的估计梯度是无偏的,条件 2是步长序列γi要求能够收敛到零,为了保证条件1,由式(18)到(20)得到 为: 基于IFT算法的实验中设定三次实验的v (m)i ,m=1,2,3是同一系统相互独立的零 均值有界随机噪声,即|v (m)i |











