
技术摘要:
用于提升并且竖向地以及可能水平地移置物体的提升设备。该提升设备包括配置有一个或多个抓握部分诸如吸力垫的第一单元,以及被配置成控制物体的竖向位置和可选地水平位置的第二单元。提升设备包括第一单元(1)和第二单元(2),第一单元(1)被配置成抓握和/或保持物体并提 全部
背景技术:
EP0493979(A1)公开了传统的真空提升/起重设备,其中,通过控制提升管内的真 空水平来控制可变长度的波纹管状提升管的伸长或收缩,该水平又通过用户可操作的阀进 行控制,以使提升管的内部与大气连接和/或隔离。因此,在完全打开的阀位置,提升管的内 部通向大气,提升管内的真空被破坏,并且在该管从悬置点竖向地悬吊的情况下,提升管下 降至其最大伸长长度。相反地,在完全关闭的阀位置中,真空处于最大,并且该管上升到其 最大收缩位置——是使用中的最大提升高度。由此得出,阀的中间开度实现中间位置。根据 EP0493979(A1)的设备公开了一种真空提升/降低头部12,该头部包括适于通过使用者4的 一只手3握持的固定上手柄2。头部12还包括适合于一只手手动操作的可移动下手柄7。在头 部12的一部分中设置有三角形的开口10,并且呈简单的覆盖板形式的对应地三角形的阀构 件11被附接到下手柄7,且能够通过使用者移动下手柄7而移位。在开口10被阀构件11完全 封闭的情况下,提升管23内存在最大真空水平,因此波纹管状的该提升管收缩至其最小长 度,以将真空提升头部带到其最大高度。因此,第一要求是使用者降低头部12,直到该头部 与待被提升、被重新定位然后被降低的物品18接合。因此,在使用者的手3的手掌握持固定 的手柄2的情况下,使用者的向下指向的手指接合在下部的可移动手柄7上并向下推动该可 移动手柄。这使孔口10暴露,通过大气空气穿过开口10的涌入超过相关联的真空泵的抽空 能力而破坏了提升管23内的真空,直到在使用者通过适当地操纵固定手柄2的引导下通过 提升管23悬置的提升头部12接触物品18。然后,对可移动手柄7的向上拉动使开口10部分地 封闭,以在提升管23和提升头部12两者内重新建立真空。通过阀构件11将开口10部分地打 开,达到使用者控制的程度,物品18被握持并且处于悬停模式,在使用者可控制的高度处。 随着使用者在可移动手柄7上的进一步向上移动,开口10被阀构件11完全地封闭并且物品 18可以被升高到最大高度并且被重新定位。由此得出,在重新定位的位置,通过用户控制阀 构件11使开口10部分暴露,降低了提升头部12和物品18,而完全暴露释放了先前被提升、移 动和降低的物品18。 WO2007094720公开了具有竖向起重管的真空起重设备,该竖向起重管被悬置在上 端处并被连接到适于被打开和关闭的真空源,该管在下端处设置有:吸力脚部和被固定到 该吸力脚部以用于操纵该吸力脚部的定位手柄;以及手动操作的阀装置,其用于准许空气 进入起重管,使得起重管能够根据在该起重管中占主导地位的空气压力在轴向上伸长和收 缩。 该设备包括管状定位手柄并且在起重管的内部与吸力脚部的内部之间构成倾斜 的、向下指向的连接部,并且设置有被定位在上端位置和下端位置之间的外部的在轴向上 5 CN 111601767 A 说 明 书 2/10 页 滑动地安装的握持套筒,该握持套筒通过连接装置连接到手动操作的阀装置,并且当握持 套筒抵抗弹簧的作用朝向其下端位置滑动时,然后该阀装置被迫使打开。在没有致动握持 套筒的情况下,阀装置是关闭的,并且在工作吸力源的情况下,吸力脚部被保持悬吊不能移 动或缓慢地提升到上提升位置,这取决于真空起重设备的调整。当握持套筒被向下滑动时, 阀装置被打开并且空气流入起重管,减小了起重管中的真空并且降低了吸力脚部。在吸力 脚部已经被放置在物体上之后,握持套筒可以被向上滑动,使得通过作用在阀装置上的弹 簧力辅助的阀装置被关闭,并且物体被牢固地吸到吸力脚部并且借此在起重管由于该起重 管内增加真空而开始收缩时被向上提升。
技术实现要素:
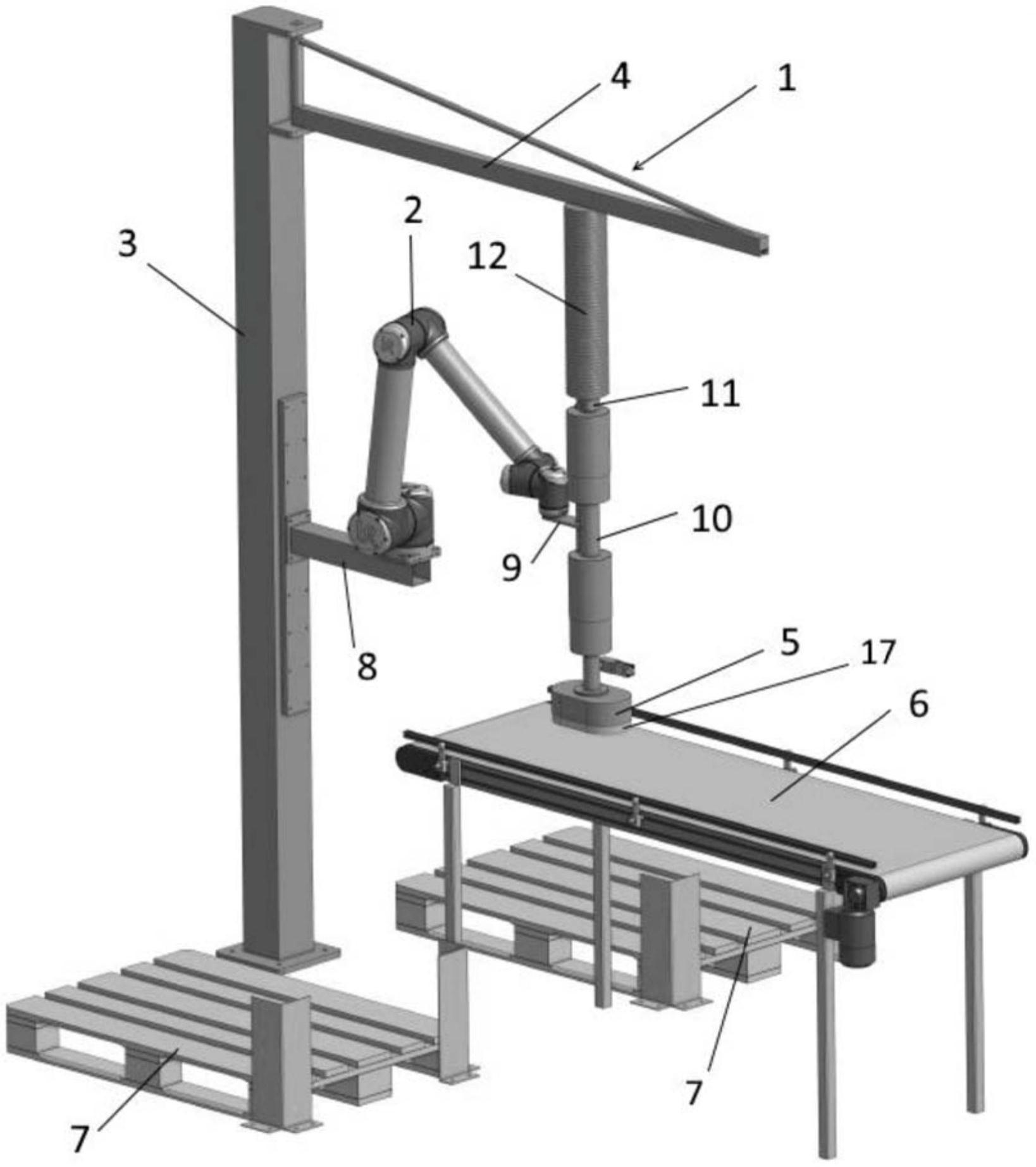
本发明的目的是提供一种在以下方面具有改进的益处的提升设备 ·工作起来较安全。由于该系统包括自动控制装置(robot,机器人、自动机械),因 此员工可以靠近该系统工作,因为一旦该系统遇到某事物,其将停止。该特征使得可以避免 覆盖设备并提供更紧凑的设计。 ·通常较易于编程。客户可以自己调整程序,从而避免了外部专家的花费。 ·快速安装。与传统系统相比,装备较少并且编程较少。 ·递送较快,因为系统较简单 根据第一方面,本发明涉及一种包括第一单元(1)和第二单元(2)的提升设备,第 一单元(1)被配置成抓握和/或保持物体并提供用于使物体在竖向方向上移动的动力,并且 第二单元(2)被配置成控制物体的竖向位置,其中,第一单元(1)包括: -静止不动的竖向延伸的部分(3);水平延伸的部分(4);以及包括第一和第二附接 位置的提升部分(12)诸如起重管,在第一附接位置处,提升部分(12)被附接或固定到水平 延伸的部分(4),并且在第二附接位置处,提升部分(12)被附接或固定到纵向构件(11),纵 向构件(11)包括抓握部分(5)诸如吸力垫; -滑动构件(10)被配置成沿着纵向构件(11)在两个方向上于第一和第二端部位置 之间滑动,并且滑动构件(10)相对于纵向构件(11)的实际位置被配置成确定提升部分(12) 的提升动力; 第二单元(2)包括第一附接位置和第二附接位置,并且 -第一附接位置被固定到第一单元(1)的竖向延伸的部分(3); -第二附接位置通过刚性连结部被固定到第一单元(1)的滑动构件(10),该刚性连 结部被配置成将由第二单元(2)在第二附接位置处引起的所有移动转移到滑动构件(10)。 根据提升设备的一个或多个实施方式,第二单元(2)可以被配置成控制物体的水 平位置,并且第二单元(2)可以被配置成相对于水平延伸的部分(4)移动。该移动可以包括 围绕竖向延伸的部分(3)的枢转移动和/或沿着水平延伸的部分(4)的线性移动。 根据提升设备的一个或多个实施方式,第二单元(2)可以包括自动控制装置或由 自动控制装置构成,该自动控制装置被配置成控制第二附接位置相对于第一附接位置的水 平和竖向位置,其中,自动控制装置被限定为能够自动地执行一系列动作或移动的部件或 系统。 根据提升设备的一个或多个实施方式,纵向构件(11)可以包括中心开口,空气可 6 CN 111601767 A 说 明 书 3/10 页 以在操作期间被迫使通过该中心开口,纵向构件(11)可以被配置成具有在纵向构件(11)的 壁的纵向方向上延伸的开口(13)。开口(13)允许空气从中心开口流动到周围环境以及从周 围环境流动到中心开口,该开口(13)被配置成使得当滑动构件在第一端部位置处时开口 (13)可以被滑动构件(10)覆盖,而当滑动构件(10)在第二端部位置处时开口(13)不被滑动 构件(10)覆盖或仅部分地被该滑动构件覆盖。“在纵向构件的壁的纵向方向上延伸”表示开 口具有将允许控制或改变开口的延伸部,通常,开口可以在纵向构件(11)的长度的0.2至 0.9倍上延伸,例如开口(13)可以在纵向构件(11)的长度的0.25至0.75倍上延伸。例如,开 口应该至少5cm长,即在5cm上延伸,优选地开口应该至少10cm长,即,在至少10cm上延伸。 根据提升设备的一个或多个实施方式,滑动构件(10)可以具有与第一单元(1)的 纵向构件(11)的外部表面轮廓对应的内部表面轮廓。 根据提升设备的一个或多个实施方式,对应的表面轮廓可以不是不是允许滑动构 件(10)相对于纵向构件(11)旋转的圆形形状或类似形状。 根据提升设备的一个或多个实施方式,滑动构件(10)可以具有与第一单元(1)的 纵向构件(11)的外部表面轮廓对应的内部表面轮廓,并且该对应的轮廓可以是多边形的, 例如矩形或椭圆形或者具有伸出部分,例如纵向延伸的条(list:嵌条、边饰)或类似物,从 而防止滑动构件10相对于纵向构件11旋转。 根据提升设备的一个或多个实施方式,提升部分(12)可以是与适于被打开和关闭 的真空源连接的真空起重管(12),该真空起重管(12)可以连接到纵向构件(11),从而允许 由真空源产生的气流通过真空起重管(12)和纵向构件(11)两者。 根据提升设备的一个或多个实施方式,提升设备可以包括阀装置(13),该阀装置 被配置成准许空气到起重管(12),使得起重管能够根据在提升管中占主导地位的空气压力 在轴向上伸长和收缩。 根据提升设备的一个或多个实施方式,滑动构件(10)的位置可以控制阀装置(13) 的打开。 根据提升设备的一个或多个实施方式,阀装置可以由在纵向构件(11)的纵向方向 上延伸的开口(13)构成。“在纵向构件的壁的纵向方向上延伸”表示开口具有将允许控制或 改变开口的延伸部,通常,开口可以在纵向构件(11)的长度的0.2至0.9倍上延伸,例如开口 (13)可以在纵向构件(11)的长度的0.25至0.75倍上延伸。例如,开口应该至少5cm长,即在 5cm上延伸,优选地开口应该至少10cm长,即,在至少10cm上延伸。 根据提升设备的一个或多个实施方式,第二单元(2)可以包括至少两个组件或臂, 该至少两个组件或臂通过枢转的铰接件连结并被放置在彼此的延伸部中,并且第二单元 (2)可以在一个端部处被枢转地固定到竖向延伸的部分(3),即一个端部不可以被拆卸,但 该一个端部可以相对于竖向延伸的部分(3)枢转,并且第二单元在第二端部处被固定到滑 动构件(10),即第二端部不可以相对于滑动构件(10)移动,而是将与滑动构件(10)一起移 动。 根据提升设备的一个或多个实施方式,第二单元(2)在第一附接位置处可以被附 接或固定到紧固装置(8),该紧固装置相对于竖向延伸的部分(3)是静止不动的并且被固定 到该竖向延伸的部分,并且在第二附接位置处,第二单元(2)可以包括控制构件(9),该控制 构件相对于滑动构件(10)静止不动的并且被固定到该滑动构件。 7 CN 111601767 A 说 明 书 4/10 页 根据提升设备的一个或多个实施方式,控制构件(9)和滑动构件(10)可以包括对 应的锁定装置,该对应的锁定装置被配置成防止滑动构件(10)相对于纵向构件(11)在除了 第一和第二位置之间沿着纵向构件(11)的限定路线以外的任何其他方向上移动。 根据提升设备的一个或多个实施方式,提升设备可以包括阀(14),该阀被定位在 滑动构件(10)和呈吸力垫形式的抓握部分(5)之间,该阀(14)可以被配置成将真空起重管 (12)的内部与吸力垫(5)的内部之间的气流分隔开。 根据提升设备的一个或多个实施方式,阀(14)可以包括能够在关闭位置与打开位 置之间移动的单元(15)诸如板,所述关闭位置防止空气从起重管(12)流动到吸力垫(5),所 述打开位置允许空气从起重管(12)流动到吸力垫(5)。 根据提升设备的一个或多个实施方式,纵向构件(11)可以包括引导装置(18),该 引导装置相对于被形成为开口的阀装置(13)被定位在不同的表面例如相反的表面上,该引 导装置(18)对应于滑动构件(10)的滑动部分(19),该滑动部分(19)适于沿着引导装置(18) 滑动。 根据提升设备的一个或多个实施方式,滑动构件(10)可以包括封闭部分(20),该 封闭部分适于将通过形成为开口的阀装置(13)的空气摄入关闭或消除,该封闭部分(20)可 以被安装成浮动的,即,封闭部分(20)可以被允许在与开口(13)周围的表面垂直的方向上 移动。 根据提升设备的一个或多个实施方式,封闭部分(20)可以通过两个或更多个伸出 部分(20a)安装,上述伸出部分与开口(13)周围的表面相垂直地延伸穿过滑动构件(10)的 盖(22)中的开口,伸出部分(20a)被配置成能够在垂直方向上移动,但不可以在与开口(13) 周围的表面平行的方向上移动。 根据提升部分(12)的一个或多个实施方式,该提升部分可以是连接到真空源的真 空起重管(12),该真空起重管(12)连接到纵向构件(11),以允许由真空源产生的气流通过 真空起重管(12)以及通过纵向构件(11),从而提供提升动力,可选地,第二真空源可以为呈 吸力垫形式的抓握部分(5)提供独立的真空。 词典 通常——在本文件的上下文中通过这些词语描述的特征可以用于如在说明书或 在权利要求书中限定的本发明的一个或所有实施方式中。 固定(Fix)、固定的(fixed)、固定地(fixedly)——两个部分相对彼此被固定意指 上述两个部分不能从彼此释放,而是可以被认为是永久地附接到彼此。 空气——词语“空气”通常可以用词语“气体”代替,即其是作为气体的空气的功 能,即倾向于无限地扩展的流体,这是结合本文件相关的,而不是成分本身。 自动控制装置——能够自动地执行一系列动作或移动的部件或系统,自动控制装 置通常是可编程的。 附图说明 图1公开了根据本发明的系统的实施方式,例示了可以如何提升并且水平地移动 物体。 图2公开了根据本发明的与提升设备的被确定成抓握物体的一部分相结合的连接 8 CN 111601767 A 说 明 书 5/10 页 部的第一实施方式的视图。 图3公开了根据本发明的连接部的第一实施方式的分解图。 图4公开了根据本发明的与被确定成抓握物体的提升设备的一部分相结合的连接 部的第二实施方式的分解视图。 图5以另一视图公开了与图4相同的实施方式。 图6公开了分隔阀和放泄阀的实施方式的分解图。











