
技术摘要:
本申请涉及一种面向工业颗粒连片制品的全局定位的方法、装置。所述方法包括:获取多张工业颗粒连片制品分割图像;根据所述工业颗粒连片制品分割图像,计算每个颗粒在所述工业颗粒连片制品分割图像中的定位信息;对多张所述工业颗粒连片制品分割图像进行拼接,获得工业 全部
背景技术:
在生产线生产的工业颗粒连片制品,是将多个颗粒连成一片生产出来连片制品, 例如,LED封装芯片的封装连片。LED是一种常用的发光器件,也称为发光二极管;与传统灯 具相比,LED节能灯具有环保、颜色范围覆盖广、响应速度快等特点;在各种需要光源的场景 中,LED灯已经发挥着重要的作用,如汽车信号灯、交通信号灯、室外大屏幕、显示器等。生产 出来的LED封装芯片的连片上包含成百上千个LED封装芯片,每个LED封装芯片非常小,甚至 1毫米不到,这对品质检测工位要求非常高,往往需要人在显微镜下观察,这个过程不仅耗 时而且成本极高。 现有对工业颗粒连片制品的全局定位方法主要包括:模板匹配方法和全局搜索方 法。这两种方法都是利用图像中的灰度信息,确定当前图像重叠部分的相似性,从而达到图 像配准的目的。模板匹配方法主要通过在搜索图中,选取子图,计算其与模板的相似度,这 种方法操作简单、配准精度高,但是对噪声敏感,且不能有旋转、尺度不一致等情况。全局搜 索方法是使待配准图在参考图像上平移,比较平移过程中两幅图像的配准程度,在进行所 有平移之后选择相似性测度最优的,这种方法准确度高,对噪声比较鲁棒,但是计算量大, 非常耗时。 现有的对工业颗粒连片制品的全局定位方法,只能适用于尺寸小的工业颗粒连片 制品,对于尺寸大的工业颗粒连片制品难以实现全局定位。
技术实现要素:
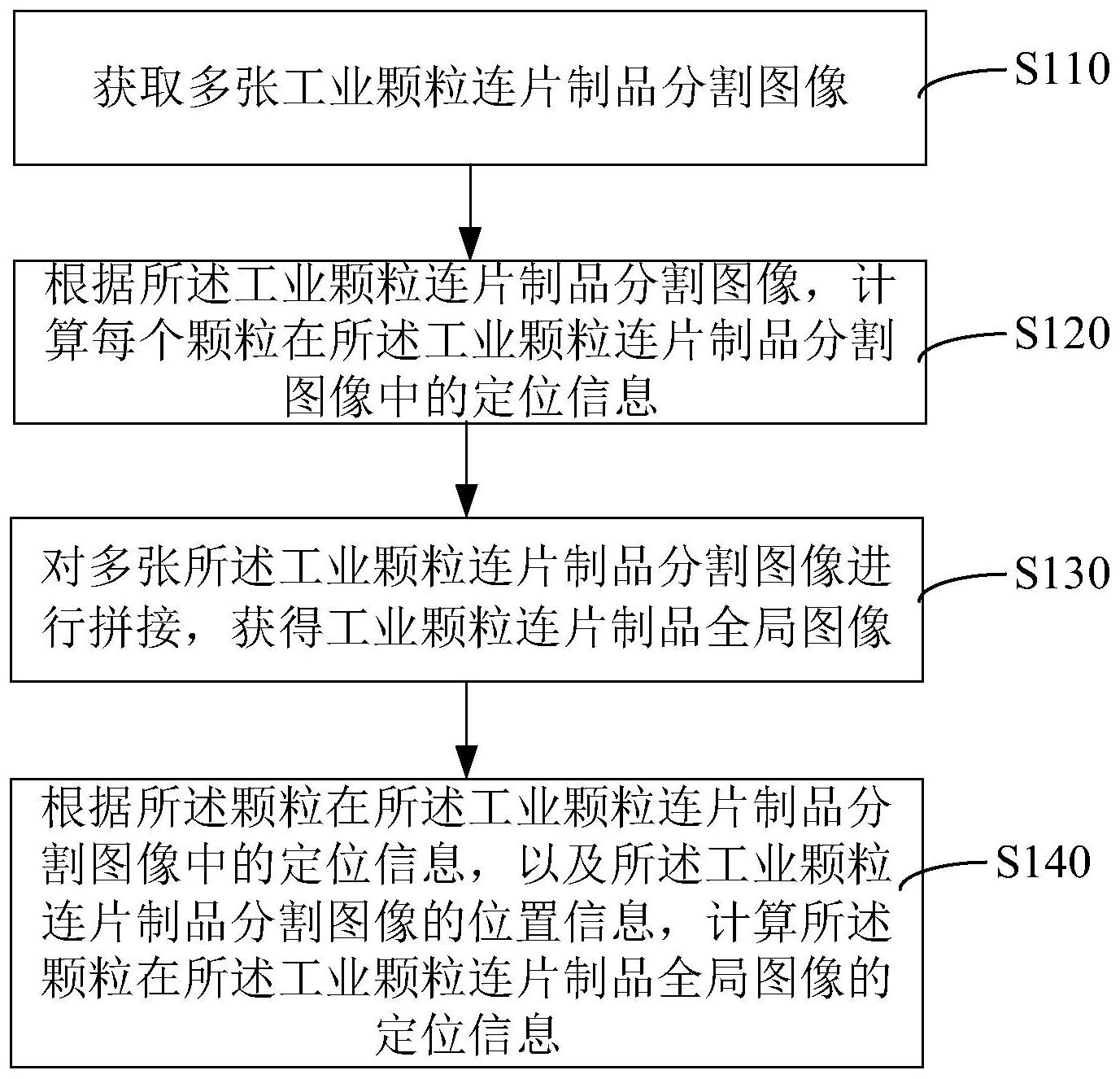
基于此,有必要针对上述技术问题,提供一种能够提高定位效率的面向工业颗粒 连片制品的全局定位的方法、装置。 一种面向工业颗粒连片制品的全局定位的方法,所述方法包括: 获取多张工业颗粒连片制品分割图像; 根据所述工业颗粒连片制品分割图像,计算每个颗粒在所述工业颗粒连片制品分 割图像中的定位信息; 对多张所述工业颗粒连片制品分割图像进行拼接,获得工业颗粒连片制品全局图 像;所述工业颗粒连片制品全局图像包括所述工业颗粒连片制品分割图像的位置信息; 根据所述颗粒在所述工业颗粒连片制品分割图像中的定位信息,以及所述工业颗 粒连片制品分割图像的位置信息,计算所述颗粒在所述工业颗粒连片制品全局图像的定位 信息。 在其中一个实施例中,所述根据所述工业颗粒连片制品分割图像,计算每个颗粒 在所述工业颗粒连片制品分割图像中的定位信息,包括:将所述工业颗粒连片制品分割图 5 CN 111553911 A 说 明 书 2/11 页 像进行二值化,获得二值工业颗粒连片制品分割图像;根据所述二值工业颗粒连片制品分 割图像进行边缘检测,获得工业颗粒连片制品目标图像;计算所述工业颗粒连片制品目标 图像的中心的像素坐标,得到所述工业颗粒连片制品目标图像在所述二值工业颗粒连片制 品分割图像中的像素坐标;其中,所述工业颗粒连片制品目标图像在所述二值工业颗粒连 片制品分割图像中的像素坐标与颗粒在所述工业颗粒连片制品分割图像中的像素坐标相 同。 在其中一个实施例中,所述根据所述二值工业颗粒连片制品分割图像进行边缘检 测,获得工业颗粒连片制品目标图像,包括:根据所述二值工业颗粒连片制品分割图像进行 边缘检测,获得边缘目标图像;判断所述边缘目标图像的尺寸是否在预设范围内;如果所述 边缘目标图像的尺寸在预设范围内,则所述边缘目标图像为工业颗粒连片制品目标图像。 在其中一个实施例中,在计算所述工业颗粒连片制品目标图像的中心的像素坐 标,得到所述工业颗粒连片制品目标图像在所述二值工业颗粒连片制品分割图像中的像素 坐标之后,包括:根据任意相邻的两个所述工业颗粒连片制品目标图像的中心距离计算参 考距离;将已知行列值的任一所述工业颗粒连片制品目标图像确定为参考目标图像;判断 在所述参考目标图像的邻域范围内的未知行列值的所述工业颗粒连片制品目标图像,与所 述参考目标图像的中心距离是否小于所述参考距离;在与所述参考目标图像的中心距离小 于所述参考距离时,根据所述参考目标图像的行列值,计算所述未知行列值的所述工业颗 粒连片制品目标图像的行列值。 在其中一个实施例中,所述参考距离包含水平参考距离和垂直参考距离; 所述判断在所述参考目标图像的邻域范围内的未知行列值的所述工业颗粒连片 制品目标图像,与所述参考目标图像的距离是否小于所述参考距离,包括:判断在所述参考 目标图像的邻域范围内的未知行列值的所述工业颗粒连片制品目标图像,与所述参考目标 图像的水平距离是否小于水平参考距离,以及垂直距离是否小于所述垂直参考距离; 所述在所述距离小于所述参考距离时,根据所述参考目标图像的行列值,计算所 述未知行列值的所述工业颗粒连片制品目标图像的行列值,包括:在所述水平距离小于水 平参考距离,以及垂直距离小于所述垂直参考距离时,根据所述参考目标图像的行列值,计 算所述未知行列值的所述工业颗粒连片制品目标图像的行列值。 在其中一个实施例中,所述对多张所述工业颗粒连片制品分割图像进行拼接,获 得工业颗粒连片制品全局图像,包括:获取前一相邻工业颗粒连片制品分割图像的像素宽 度和像素高度;根据所述像素宽度和像素高度计和预设重叠区域的重叠宽度和重叠长度, 计算当前工业颗粒连片制品分割图像的边缘角在所述工业颗粒连片制品全局图像的像素 坐标;根据所述边缘角在所述工业颗粒连片制品全局图像的像素坐标,确定所述当前工业 颗粒连片制品分割图像的拼接位置;将所述当前工业颗粒连片制品分割图像平移到所述拼 接位置;重复上述步骤,直到所有所述工业颗粒连片制品分割图像平移到拼接位置,获得工 业颗粒连片制品全局图像。 在其中一个实施例中,在所述根据所述边缘角在所述工业颗粒连片制品全局图像 的像素坐标,确定所述当前工业颗粒连片制品分割图像的拼接位置之后,包括:计算所述前 一相邻工业颗粒连片制品分割图像和所述当前工业颗粒连片制品分割图像在所述预设重 叠区域中的所述颗粒的最小偏移量;根据所述最小偏移量对所述拼接位置进行修正。 6 CN 111553911 A 说 明 书 3/11 页 在其中一个实施例中,所述根据所述颗粒在所述工业颗粒连片制品分割图像中的 定位信息,以及所述工业颗粒连片制品分割图像的位置信息,计算所述颗粒在所述工业颗 粒连片制品全局图像的定位信息,包括:根据所述颗粒在所述工业颗粒连片制品分割图像 中的定位信息,获取所述颗粒在所述工业颗粒连片制品分割图像中的像素坐标;根据所述 颗粒在所述工业颗粒连片制品分割图像中的像素坐标和所述工业颗粒连片制品分割图像 的位置信息,计算所述颗粒在所述工业颗粒连片制品全局图像的像素坐标;根据所述颗粒 在所述工业颗粒连片制品分割图像中的定位信息,获取所述颗粒在所述工业颗粒连片制品 分割图像中的行列值;根据所述颗粒在所述工业颗粒连片制品分割图像中的行列值和所述 工业颗粒连片制品分割图像的位置信息,计算所述颗粒在所述工业颗粒连片制品全局图像 的行列值。 在其中一个实施例中,所述面向工业颗粒连片制品的全局定位的方法还包括:根 据所述定位信息,在所述工业颗粒连片制品全局图像对每个所述颗粒进行标注。 一种面向工业颗粒连片制品的全局定位的装置,所述装置包括: 工业颗粒连片制品分割图像获取模块,用于获取多张工业颗粒连片制品分割图 像; 局部定位模块,用于根据所述工业颗粒连片制品分割图像,计算每个颗粒在所述 工业颗粒连片制品分割图像中的定位信息; 拼接模块,用于对多张所述工业颗粒连片制品分割图像进行拼接,获得工业颗粒 连片制品全局图像;所述工业颗粒连片制品全局图像包括所述工业颗粒连片制品分割图像 的位置信息; 全局定位模块,用于根据所述颗粒在所述工业颗粒连片制品分割图像中的定位信 息,以及所述工业颗粒连片制品分割图像的位置信息,计算所述颗粒在所述工业颗粒连片 制品全局图像的定位信息。 上述面向工业颗粒连片制品的全局定位的方法、装置,通过将工业颗粒连片制品 连续拍摄获得多个工业颗粒连片制品分割图像,对每个工业颗粒连片制品分割图像进行颗 粒的定位信息识别,能够提高颗粒的定位信息的获取效率和准确率,同时根据工业颗粒连 片制品分割图像在全局图像的位置信息和工业颗粒连片制品分割图像中颗粒的定位信息, 能够计算得到颗粒在所述工业颗粒连片制品全局图像的定位信息;本申请所述方法尤其适 用于大尺寸的工业颗粒连片制品的全局定位打标,通过分块检测颗粒位置的方式,提高了 大尺寸工业颗粒连片制品的检测效率。 附图说明 图1为一个实施例中面向工业颗粒连片制品的全局定位的方法的流程示意图; 图2为一个实施例中工业颗粒连片制品分割图像二值化和边缘检测的示意图; 图3为一个实施例中工业颗粒连片制品分割图像拼接示意图; 图4为一个实施例中工业颗粒连片制品分割图像抖动修正后的拼接示意图; 图5为一个实施例中面向工业颗粒连片制品的全局定位的装置的结构框图; 图6为一个实施例中计算机设备的内部结构图。 7 CN 111553911 A 说 明 书 4/11 页











