
技术摘要:
本发明涉及一种车道添加的方法及系统,涉及车道系统的技术领域,其包括如下步骤:S100:建图;S200:导入车道数据;S300:优化车道数据;S400:将车道数据导入当前地图数据中,当前地图数据包括当前场景地图及配置文件,配置文件中储存有独立于当前场景地图外的车道信 全部
背景技术:
目前,清洁机器人可用于对地面进行自动清洁,应用场景可以为家庭室内清洁、大 型场所清洁以及地下车库清洁等。为了使清洁机器人完成清洁地下车库每条车道的任务, 需要对清洁机器人的清洁路径进行规划和控制。 目前在清洁机器人领域,车道建模大多是通过高精度地图导入得到。但由于地库 车道较为简单,当地库车道改变后,一般不需要再耗费成本进行一次高精度地图数据的采 集工作,因此地下车库一般没有预先准备好的更新地图。当地下车库的车道增加或减少时, 就无法实现清洁机器人车道信息的自动添加。
技术实现要素:
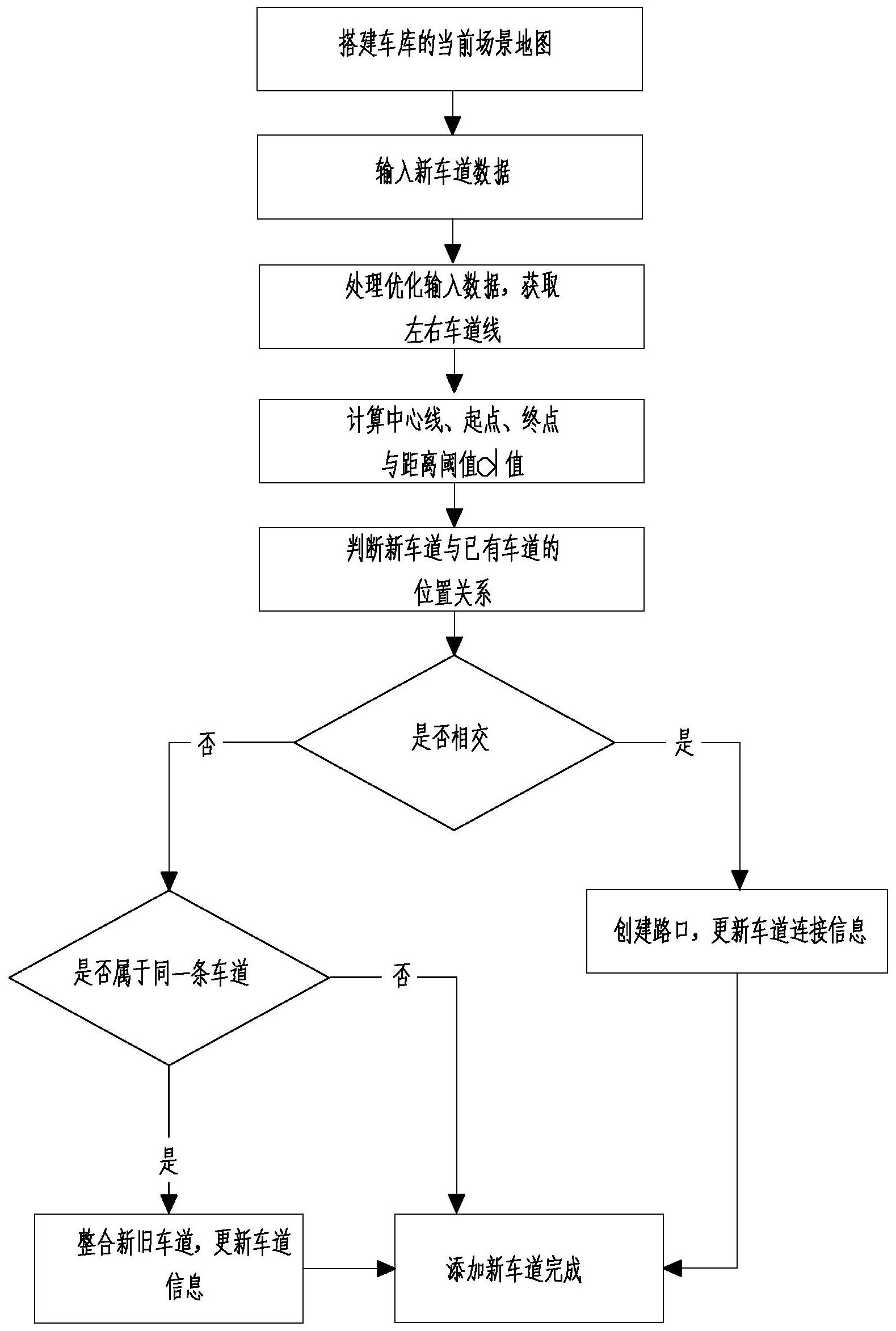
针对现有技术存在的不足,本发明的第一目的是提供一种车道添加的方法及系 统,能实现清洁机器人车道信息的自动添加。 本发明的上述发明目的是通过以下技术方案得以实现的:一种车道添加的方法, 包括如下步骤: S100:建图,获取当前场景地图; S200:导入车道数据,导入通过行车标志线检测模块获取的车道数据,一次输入与处理 一条车道,车道数据包括通过多个采样点连接的折线所形成的左右车道线,左右车道线相 互平行且间距为设定值; S300:优化车道数据,使车道完整、左右车道线一致,对车道线进行直线拟合以及点的 取样; S400:将车道数据导入当前地图数据中,当前地图数据包括当前场景地图及配置文件, 配置文件中储存有独立于当前场景地图外的车道信息; S500:第一条车道将直接添加到地图中,从添加第二条车道开始执行判断是否与已添 加的车道相交的操作;若两条车道相交,则执行判断相交类型的操作,并将相交类型转化为 车道信息;若两条车道不相交,则执行判断两条车道是否为同一条车道的两段的操作;如果 判断两条车道是同一条车道的两段,则对新旧两条车道进行合并操作; S600:在添加好车道的当前场景地图上匹配车道信息,完成车道的添加。 通过采用上述技术方案,通过slam方法使用激光雷达或深度相机等设备对地下车 库进行当前场景地图的采集与搭建,形成原始地图;之后导入车道数据至机器人主程序运 行的算法板且每次输入与处理一条新增的车道;之后再通过线条拟合及点的取样优化车道 数据,提高计算精度;之后结合当前场景地图与车道数据,对原有车道与新车道的相交关系 进行分类和判定,并按照分类、判定结果匹配相应的车道信息,车道信息即名称标识等,从 而对新车道进行添加与存储,对原有车道数据进行更新,方便后期清洁机器人执行巡航清 5 CN 111578948 A 说 明 书 2/9 页 洁任务,进而实现清洁机器人车道数据的自动添加。 本发明在一较佳示例中可以进一步配置为:所述步骤S500中的车道信息包括车道 名称、区域类型、车道来源、原始数据、两条车道线、中心线、车道长度、车道宽度以及车道连 接信息。 通过采用上述技术方案,通过车道信息的匹配,对车道进行分类与定义,实现车道 数据的可视化和系统化,方便后期的筛选以及对机器人的控制,从而提升工作效率。 本发明在一较佳示例中可以进一步配置为:所述步骤S500中还包括以下步骤: S510:通过左右车道线,计算出中心线,取左右车道线上相对称位置的点的连线的中 点,连接连续的多个中点以形成中心线; S520:记录中心线的两端端点,定义为“起点”和“终点”; S530:依次提取地图中的原有车道,获得其中心线,定义新车道为车道A,与之比较的地 图中已有车道为车道B;通过计算两条车道左右车道线对称位置的两点的距离的平均值,分 别获得车道A的宽度为D1、车道B的宽度为D2;根据D1、D2计算车道A与车道B的中心线两端的 延长线段; S540:计算延长线段,以车道A中心线上与起点相邻的点至起点的直线方向为延长线的 方向,截取长度为D2的线段,作为起点处的延长线段;以上述方法获取中心线终点处的长度 为D2的延长线段;以上述方法获取车道B中心线两端的延长线段,其长度为D1;判断车道A与 车道B的中心线及延长线段之间是否存在交点; 如没有交点或交点在当前场景地图范围之外的,判定两车道不相交; 如果有交点,则两条车道相交,执行判断相交类型的操作。 通过采用上述技术方案,通过左右车道线计算出中心线,在此基础上得到起点与 终点,通过新车道中心线及其两端的延长线段与地图上每条原有车道的中心线及其两端延 长线段的交点判定新车道与原有车道是否相交,同时为相交类型的分类提供判定基础,从 而方便定义新的车道。 本发明在一较佳示例中可以进一步配置为:所述步骤S540中:如果新车道中心线 及其两端的延长线段与地图中每一条原有车道的中心线及其两端延长线段不存在交点,进 一步判定两条中心线的延长线段是否存在平行或重合的情况,若存在则计算该两条线段之 间的距离L并设定距离阈值l,距离阈值l等于D1、D2中较小值的一半;否则判定为不相交; 若距离L大于l,判定为两条车道不相交;若距离L小于或等于l,则分别计算车道A的起 点或终点与车道B的起点或终点的距离,若存在某一段的距离小于l,且读取当前场景地图 时该段距离两端的点之间无“障碍”,判定这两条车道为同一条车道上的两段,否则判定为 不相交。 通过采用上述技术方案,新车道中心线及其两端的延长线段与地图中每一条原有 车道的中心线及其两端延长线段不存在交点时,通过设定阈值I、以及两条平行线的距离L 判定两条车道是不相交或者是同一条车道的两段,若存在某一条车道起点与终点的距离小 于I,且读取当前场景地图时两点之间没有对应“障碍”的栅格,即表示两点之间无“障碍”, 以此判定这两条车道为同一条车道上的两段,从而方便车道信息的匹配。 本发明在一较佳示例中可以进一步配置为:所述步骤S500中的执行判断相交类型 的操作:根据车道A中心线及其两端的延长线段与车道B的中心线及其两端延长线段的交点 6 CN 111578948 A 说 明 书 3/9 页 的位置判断车道相交情况,设定距离阈值d1 = D1/2 e,d2 = D2/2 e,e为设定误差值: 类型1:交点均在两条车道内,并且距离车道A的起点、终点均大于距离d2,并且距离车 道B的起点、终点均大于d1,判定两条车道通过十字路口的方式相交; 类型2:交点均在两条车道内,并且距离车道A的起点或终点的最小距离小于等于d2,距 离车道B的起点、终点均大于d1;或者距离车道B的起点或终点的最小距离小于等于d1,距离 车道A的起点、终点均大于d2,表示两条车道通过T字路口的方式相交; 类型3:交点均在两条车道内,并且距离车道A的起点、终点的最小距离均小于等于距离 d2,并且距离车道B的起点、终点的最小距离均小于等于距离d1,表示两条车道通过拐角相 连; 类型4:类型3中,当交点处两条中心线或两条中心线的延长线段的夹角大于等于135° 时,则判定这两条车道为同一条车道上的两段; 类型5:交点在车道A的外部,并且距离车道A的起点、终点均大于距离d2,或者交点在车 道B的外部,并且距离车道B的起点、终点均大于距离d1,或者两种情况均成立,说明两条车 道不相交;否则,若交点与不包含交点的车道的起点或终点的最小距离小于距离阈值,则读 取当前场景地图,若当前场景地图两点之间无“障碍”,则判定车道原始数据存在误差,判定 为交点在车道内,重新按照类型1、类型2以及类型3的规则进行判定处理;其中,若不包含交 点的车道为车道A,则距离阈值取d1,若不包含交点的车道为车道B,则距离阈值取d2;若当 前场景地图中两点之间有障碍则说明两条车道不相交。 通过采用上述技术方案,通过车道起点或终点与两条车道的交点的间距判定两条 车道的相交情况,而设定阈值d1、d2分别为车道A、B宽度的一半,以此根据交点至起点或终 点的距离与d1、d2的大小关系判定两条车道的相交类型,以此方便匹配车道信息,且当交点 处两条中心线(或延长线段)夹角大于等于175°,则判定这两条车道为同一条直道上的两 段,从而方便后期的合并车道操作;由于实际测量时会有误差,而实验所得误差最大值接近 且小于5°,因此180°调整为175°,以此提升判断的准确率。 本发明在一较佳示例中可以进一步配置为:设定两条车道相交处为路口,车道信 息包括路口信息,路口信息包括:路口名称、区域类型、中心点、边、与边对应的相连车道的 名称; 路口的中心点,即产生路口的相交车道的中心线的交点; 路口的边,计算两条相交车道的左右车道线的交点,相邻的交点连成一条边,并按照顺 时针或逆时针记录; 记录相连车道名称,与边的位置一一对应。 通过采用上述技术方案,通过路口信息对两条车道的相交处进行单独的定义,以 此方便对车道信息进行完善,使车道数据系统化,且路口的中心点与边单独分离,以此方便 对车道信息进行可视化的管理。 本发明在一较佳示例中可以进一步配置为:对产生新路口的车道,相交模式是十 字路口或T字路口的,则对相应车道进行分离操作; 分离操作:将生成的路口所截断的车道分离成两条新车道,各自拥有独立的名称;同时 更新与原车道连接的车道及路口的信息。 通过采用上述技术方案,通过路口分离车道,将同一条车道分离成不同条新的车 7 CN 111578948 A 说 明 书 4/9 页 道,以此方便对某一单独段的车道进行划分,方便后期对清洁机器人的行进路线进行微调, 从而方便管理和控制。 本发明在一较佳示例中可以进一步配置为:如果判断两条车道是同一条车道的两 段,则对新车道与原有车道进行合并操作,将二者的左右车道线、中心线分别按顺序首尾连 接成一条线; 同时调整连接后线的采样点,使采样点的位置保持连续; 为合并后的车道设定独立的名称,并根据原车道的信息,更新新车道及与原车道连接 的车道及路口的信息。 通过采用上述技术方案,通过合并新车道与原有车道的操作对不同段的车道进行 整合,以此方便后续的管理,且同步调整合并后左右车道线上的采样点,以此方便后期添加 新车道以及更新原有车道时的计算与判定。 本发明在一较佳示例中可以进一步配置为:当判定需要进行合并或分离操作时, 记录下该操作信息,继续进行新车道与其余车道的位置关系判定; 待所有车道均判定过之后,在根据记录的操作信息,统一执行合并与分离的操作。 通过采用上述技术方案,对合并与分离的操作进行记录,方便后期的调取与调整, 同时先记录后执行的方式,可以减少反复更新车道信息所耗费的算力,提升计算效率,缩短 响应时间。 本发明的第二目的是提供一种车道添加的系统,能方便添加新的车道。 本发明的上述发明目的是通过以下技术方案得以实现的:一种车道添加的系统, 其应用于实现上述第一目的中的方法,包括车道数据获取单元,用于获取车道数据。 通过采用上述技术方案,通过车道数据获取单元方便获取车道数据。 综上所述,本发明包括以下至少一种有益技术效果: 通过slam方法使用激光雷达或深度相机等设备对地下车库进行当前场景地图的采集 与搭建,形成原始地图;之后导入车道数据至机器人主程序运行的算法板且每次输入与处 理一条新增的车道;之后再通过线条拟合及点的取样优化车道数据,提高计算精度;之后结 合当前场景地图与车道数据,对原有车道与新车道的相交关系进行分类和判定,并按照分 类、判定结果匹配相应的车道信息,车道信息即名称标识等,从而对新车道进行添加与存 储,对原有车道数据进行更新,方便后期清洁机器人执行巡航清洁任务,进而实现清洁机器 人车道数据的自动添加; 通过左右车道线计算出中心线,在此基础上得到起点与终点,通过新车道中心线及其 两端的延长线段与地图上每条原有车道的中心线及其两端延长线段的交点判定新车道与 原有车道是否相交,同时为相交类型的分类提供判定基础,从而方便定义新的车道; 通过车道起点或终点与两条车道的交点的间距判定两条车道的相交情况,而设定阈值 d1、d2分别为车道A、B宽度的一半,以此根据交点至起点或终点的距离与d1、d2的大小关系 判定两条车道的相交类型,以此方便匹配车道信息。 附图说明 图1是本实施例的整体逻辑框图; 图2是本实施例的部分逻辑框图,主要展示两车道是否相交的判定; 8 CN 111578948 A 说 明 书 5/9 页 图3是本实施例的部分逻辑框图,主要展示两车道相交类型的划分; 图4是本实施例的示意图,主要展示误差设定值; 图5是本实施例的示意图,主要展示十字路口的相交类型; 图6是本实施例的示意图,主要展示T字路口的相交类型; 图7是本实施例的示意图,主要展示拐角路口的相交类型。











