
技术摘要:
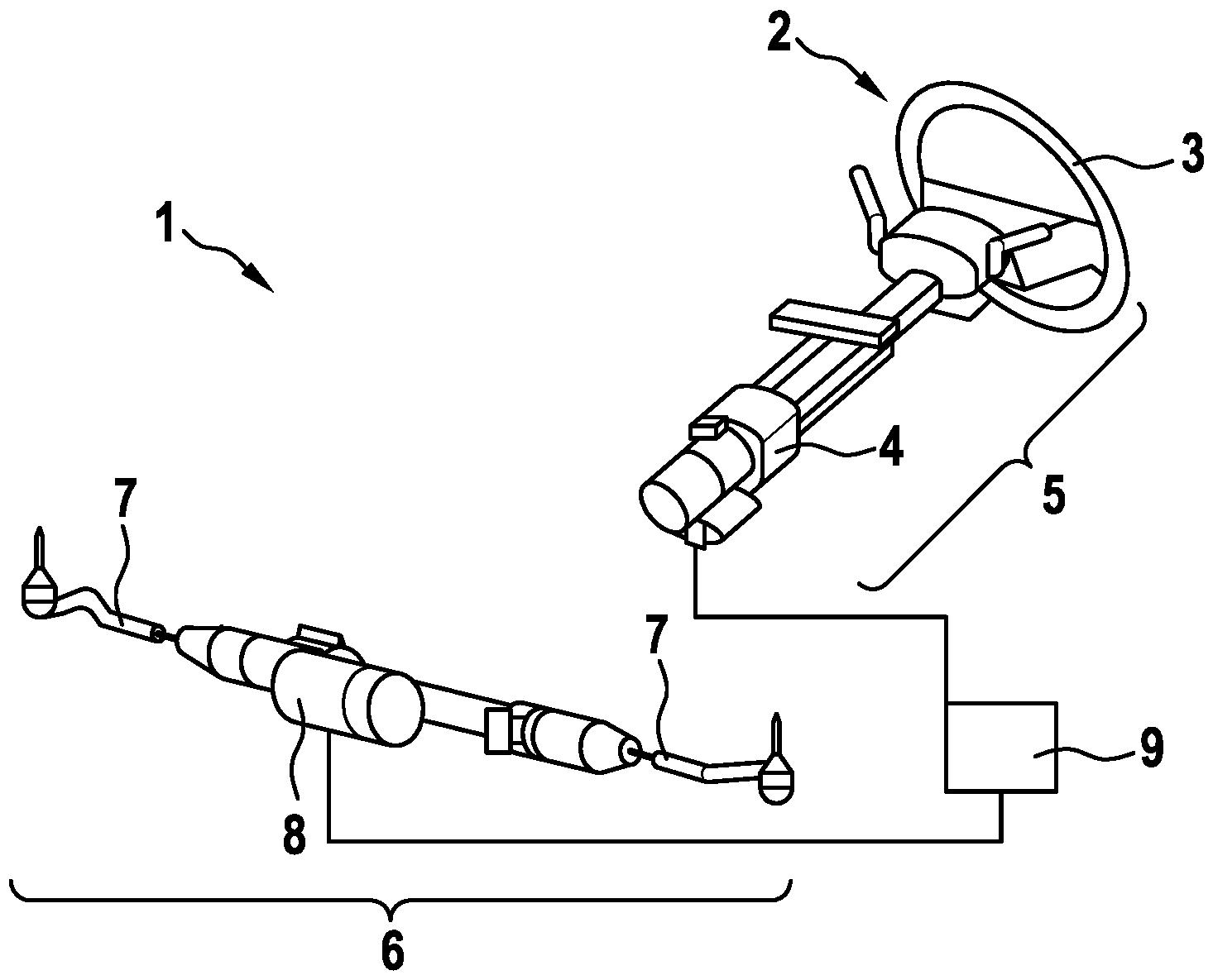
本发明涉及一种用于运行用于机动车的转向系统(1)的方法,所述转向系统一方面具有能够由所述机动车的驾驶员操作的转向手柄(2)和配属于所述转向手柄(2)的手动力矩调节器(4),该手动力矩调节器被构造用于将反作用于通过驾驶员进行的操作的阻尼力施加到所述转向手 全部
背景技术:
对于以下转向系统来说有待转向的车轮与有待由使用者来操作的转向手柄之间 的直接的机械耦合被中断,所述转向系统被称为线控转向系统,因为对于车轮转向角的控 制以电的方式来进行。在使用线控转向技术时存在一种自由度,该自由度允许在不取决于 有待转向的车轮的情况下使转向手柄运动。所述手动力矩调节器在正常运行中施加反作用 于驾驶员的、用于产生转向感觉的力到转向手柄上,以用于模拟与有待转向的车轮的反向 耦合。这种力在需要时、尤其在转向速度离开允许的范围时与阻尼力或者阻力力矩叠加。由 此对驾驶员来说驾驶感觉得到优化,方法是:尤其模拟传统的机械的转向系统的驾驶感觉。 由公开文献DE 100 21 814 A1已知一种这样的转向系统,对于该转向系统来说此 外在所述手动力矩调节器失灵时主动地对转向手柄的调节运动进行阻尼,方法是:将阻尼 力施加到所述转向手柄上,所述阻尼力作为阻力力矩反作用于使用者或者驾驶员的操作力 或者操作力矩。在所述手动力矩调节器失灵时,通过单独的线路装置在电动的手动力矩调 节器的转子与定子之间产生阻尼力矩。由公开文献DE 100 51 187 A1已知一种转向系统, 该转向系统也在手动力矩调节器失灵时维持转向系统的运行。为此,设置了弹簧元件和阻 尼元件,它们作用到转向手柄上,以用于影响所述转向手柄的调节速度。US 2007/0257461 A1也公开了一种用于线控转向系统的阻尼系统并且公开文献 WO 2016/031058 A1公开了 一种转向系统,对于该转向系统来说应该防止方向盘运动与车轮角设定之间的偏差。
技术实现要素:
所述按本发明的具有权利要求1的特征的方法所拥有的优点是,对驾驶员来说转 向感觉进一步得到改进并且由此行车安全性和可控制性得到优化。按照本发明,这通过具 有权利要求1的特征的方法来实现,其中根据所述车轮角调节器的当前的效率来产生由所 述手动力矩调节器产生的阻尼力。因此,在操控所述手动力矩调节器时要考虑到,所述车轮 角调节器能够在多大程度上在至少一个车轮上实现通过转向手柄预先给定的转向角。由 此,驾驶员自动地得到关于由其所要求的转向力矩或者所要求的转向角在多大程度上得到 实现的反馈或回馈。尤其随着所述车轮角调节器的效率的减小,通过所述手动力矩调节器 4 CN 111587207 A 说 明 书 2/6 页 来提高阻尼力,使得驾驶员直观地感觉到,在至少一个车轮上达到所期望的转向角这一点 要求用提高的操作力矩或者用提高的操作力来操作所述转向手柄。 按照本发明的一种优选的实施方式,根据车轮的所设定的实际-车轮角与有待设 定的目标-车轮角之间的差来获取所述效率。作为目标参量为所述车轮角调节器预先给定 所述目标-车轮角并且连续地对所述实际-车轮角进行监控,以用于能够将这二者彼此进行 比较。随着所述差的增大,而断定所述车轮角调节器的效率的减小并且优选要提高所述阻 尼力,以用于实现上面所提到的效应。 按照本发明的另一种实施方式,优选规定,根据所述车轮角调节器的所设定的调 节力矩和目标力矩来获取所述效率。在此要监控,所述车轮角调节器是否能够提供为了实 现目标-车轮角而必要的调节力矩。如果所设定的调节力矩与所期望的目标力矩不符,则断 定效率的减小并且要相应地提高所述阻尼力。在此,能够动用所述车轮角调节器的通常本 来可用的信号,所述信号反映所设定的调节力矩或者实际力矩。为此,比如要监控所述车轮 角调节器的工作电流并且将其与所期望的工作电流进行比较。 优选根据由驾驶员施加到转向手柄上的操纵力矩来确定所述阻尼力。由此实现这 一点,即:提供与对于所述转向手柄的操作相匹配的阻尼力,所述阻尼力对驾驶员来说进一 步改进行驶性能。尤其要监控,究竟是否将操纵力矩施加到所述转向手柄上。 优选只有在检测到操纵力矩时才产生阻尼力。如果没有检测到操纵力矩,也就是 说如果所述操纵力矩为零,那就不产生所述阻尼力。由此防止,通过所述手动力矩调节器本 身来开始不希望的转向运动。除此以外,将能耗降低到最低限度。 按照本发明的一种优选的改进方案来规定,根据所述转向手柄的运动速度来确定 所述阻尼力。由此使所述阻尼力与使用者的操作相匹配,由此,与机械的转向系统相比,通 过所述阻尼力引起的触觉上的反馈对驾驶员来说显得更加自然。 尤其在此规定,随着运动速度的增加而更大力度地施加所述阻尼力。由此,在驾驶 员更快地操纵转向手柄时,提高的反作用力矩反作用于该驾驶员,由此给其进行有利的反 馈。此外,在操纵转向手柄时在此对驾驶员进行限制,以用于遵守或者“捕获”目标-车轮角 与实际-车轮角之间的差。这尤其由以下情况而产生,即:根据效率和所述转向手柄的运动 速度来获取所述阻尼力。在运动速度高时,实际-车轮角偏离目标-车轮角的可能性也提高, 因而在这里提高的阻尼力是有利的,以用于对转向手柄的运动进行限制并且由此通过使用 者或者驾驶员在转向手柄上的制动所述能转向的车轮能够遵循所保证的公差。 尤其连续地或者分阶段地提高所述阻尼力。在连续地提高时,随着速度的增大来 相应地提高所述阻尼力。如果分阶段地提高,则随着运动速度的增大能够由驾驶员感觉到 不同的阻尼力。由此,驾驶员比如得到关于其处于何种速度范围内的通知。对于最佳的驾驶 体验来说,连续的提高是优选的。在另一种实施方式中,设置了由分阶段的提高和连续的提 高构成的组合,其中于是首先在运动速度低时不提高阻尼力,随着超过极限速度的情况则 首先提高所述阻尼力,并且而后随着运动速度的进一步增大而连续地提高所述阻尼力。 此外,优选规定,根据车速和/或运动速度的梯度或车轮角调节速度来影响所述阻 尼力。由此保证对于阻尼力的进一步的优化并且由此对驾驶员来说保证驾驶感觉的进一步 优化。 此外优选规定,根据所述转向手柄的运动速度来设定转向手柄与车轮角调节器之 5 CN 111587207 A 说 明 书 3/6 页 间的传动比。对于机械的转向系统来说,设置了转向手柄与所设定的车轮角之间的固定的 传动比,对于所述固定的传动比来说在连续的运行中不可能有偏离。通过所提出的实施方 式来实现这一点,即:在连续的运行中所述传动比能够调整,使得所设定的车轮角在相对于 所述转向手柄上的所设定的转向角的比例中根据运动速度来变化。因此,尤其规定,随着所 述转向手柄的运动速度的增大并且随着以中性位置为出发点目标-车轮转向角的增大来提 高所述传动比。 尤其在超过运动速度的能预先给定的极限速度时提高所述传动比。由此,适宜地 大于零的极限速度因而用作用于开始所述传动比的变化的触发因素。只有在超过极限速度 时才提高所述传动比。 尤其在不取决于所述转向手柄的运动速度的情况下,优选将所述传动比限制到最 大值。由此保证驾驶员不会惊讶于不期望的大的转向角。 此外,优选规定,只有在为了提高车轮角而操作所述转向手柄时,才提高所述传动 比。这意味着,如果为了降低车轮角而操作所述转向手柄,则不提高所述传动比,这与运动 速度无关。在使车轮从偏转的位置运动到中性位置或者超过中性位置的位置中时,比如在 车轮转向角的过零点中撤回虚拟地并且间接地设定的提高的传动比。 所述按本发明的具有权利要求14的特征的装置的特征在于,至少一个控制器专门 被安排用于在按照规定使用时、也就是在运行机动车时执行按本发明的方法。由此,产生已 经提到的优点。按照第一种实施方式存在着一个控制器,该控制器不仅运行所述手动力矩 调节器而且运行所述车轮角调节器。作为替代方案,按照另一种实施方式存在着两个控制 器,其中一个控制器操控所述车轮角调节器并且另一个控制器操控所述手动力矩调节器。 此外,按照另一种实施方式来规定,为所述两个控制器分配了上级的控制器,该上级的控制 器对所述两个控制器进行协调,以用于运行所述手动力矩调节器和车轮角调节器。另外的 优点和优选的特征以及特征组合由前述说明以及权利要求来得出。 所述按本发明的具有权利要求15的特征的转向系统的特征在于按本发明的装置。 在此得出已经提到的优点。 附图说明 下面要借助于附图来详细解释本发明。为此: 图1以简化的图示示出了用于机动车的转向系统; 图2示出了有利的用于运行所述转向系统的方法的第一种实施例; 图3示出了所述方法的第二种实施例;并且 图4示出了所述方法的第三种实施例。











