
技术摘要:
本申请公开了一种用于更新点云的方法和装置,涉及自动驾驶领域。具体实现方案为:基于采集新增点云的点云采集设备的位姿所构成的集合,从待更新的历史点云中确定出与新增点云匹配的区域点云;将新增点云合并至所匹配的区域点云中,得到合并后的历史点云;基于合并后的 全部
背景技术:
高精度地图也称为高分辨率地图(HD Map,High Definition Map),是一种专门为 自动驾驶服务的地图。与传统导航地图不同的是,高精度地图除了能提供的道路(Road)级 别的导航信息外,还能够提供车道(Lane)级别的导航信息。无论是在信息的丰富度还是信 息的精度方面,都是远远高于传统导航地图的。 相关技术中,高精图地图是基于采集到的点云构建的,为了保证地图的时效性和 精度,需要根据新采集的点云对已有的历史点云进行更新。
技术实现要素:
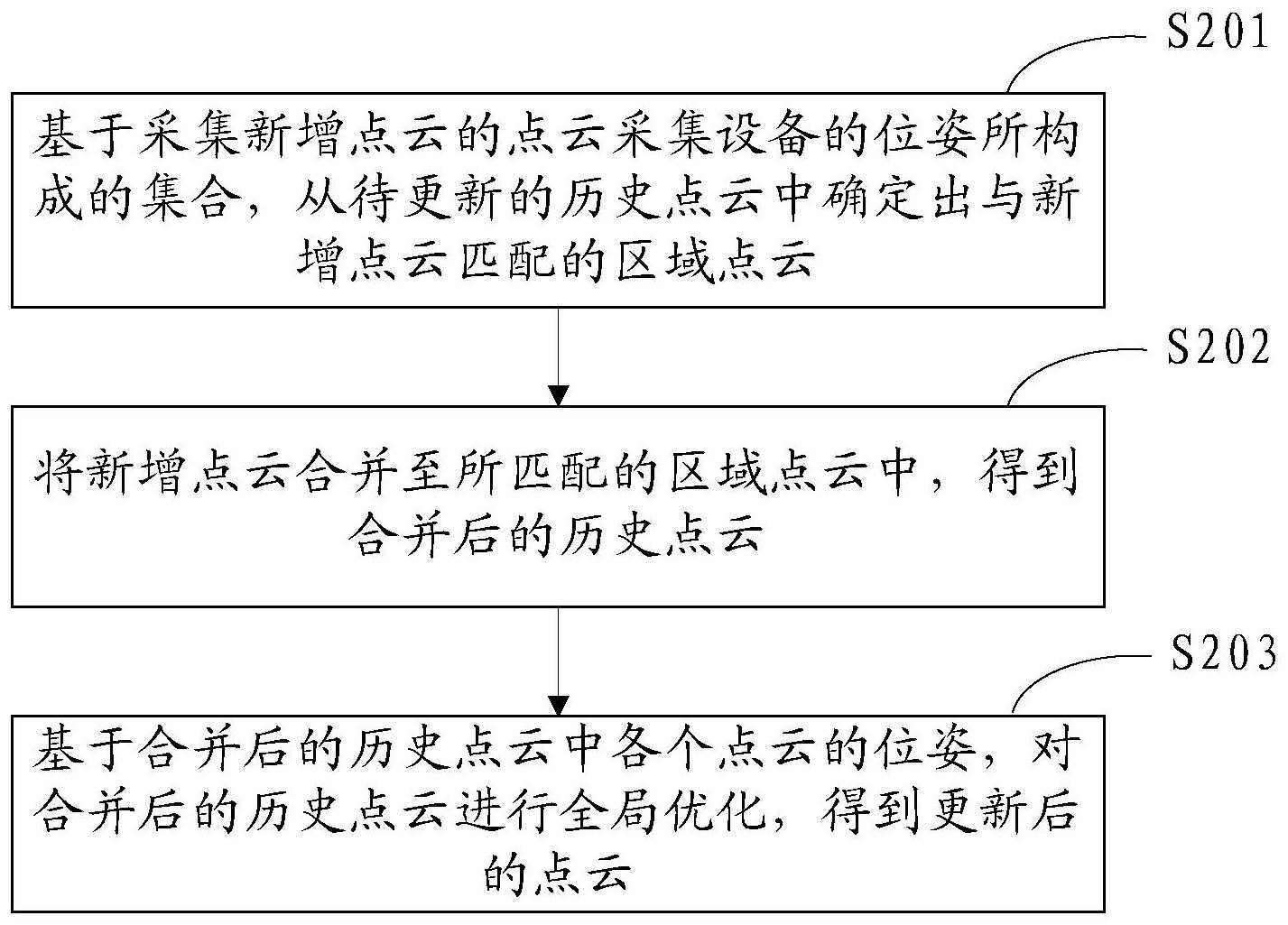
本申请实施例提供了一种用于更新点云的方法、装置、设备以及存储介质。 根据第一方面,本申请实施例提供了一种用于更新点云的方法,该方法包括:基于 采集新增点云的点云采集设备的位姿所构成的集合,从待更新的历史点云中确定出与新增 点云匹配的区域点云;将新增点云合并至所匹配的区域点云中,得到合并后的历史点云;基 于合并后的历史点云中各个点云的位姿,对合并后的历史点云进行全局优化,得到更新后 的点云。 根据第二方面,本申请实施例提供了一种用于更新点云的装置,该装置包括:区域 确定模块,被配置成基于采集新增点云的点云采集设备的位姿所构成的集合,从待更新的 历史点云中确定出与新增点云匹配的区域点云;点云合并模块,被配置成将新增点云合并 至所匹配的区域点云中,得到合并后的历史点云;位姿优化模块,被配置成基于合并后的历 史点云中各个点云的位姿,对合并后的历史点云进行全局优化,得到更新后的点云。 根据第三方面,本申请实施例提供了一种电子设备,包括:至少一个处理器;以及 与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指 令,指令被至少一个处理器执行,以使至少一个处理器能够执行上述用于更新点云的方法。 根据第四方面,本申请实施例提供了一种存储有计算机指令的非瞬时计算机可读 存储介质,其中,计算机指令用于使计算机执行上述用于更新点云的方法。 本申请实施例提供的用于更新点云的方法、装置、设备以及存储介质,解决了相关 技术中更新历史点云时运算量大导致的效率较低、耗时较长的问题,通过点云采集设备的 位姿确定与新增点云匹配的区域点云,只调用与新增点云匹配的区域点云即可实现新增点 云的拼接,拼接过程中无需全部历史点云参与运算,从而降低了点云拼接时的运算量,提高 了点云更新的效率。 应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特 征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。 4 CN 111553844 A 说 明 书 2/8 页 附图说明 附图用于更好地理解本方案,不构成对本申请的限定。其中: 图1是本申请的实施例可以应用于其中的示例性系统架构图; 图2是根据本申请第一实施例的示意图; 图3是根据本申请提供的用于更新点云的方法的一个场景示意图; 图4是根据本申请第三实施例的示意图; 图5是用来实现本申请实施例的用于更新点云的方法的电子设备的框图; 图6是可以实现本申请实施例的计算机可存储介质的场景图。











