
技术摘要:
本申请的实施例提供了一种车辆驾驶策略的推荐方法、装置、计算机可读介质及电子设备。该方法包括:获取目标车辆所在路段的环境参数、以及该路段中各个车辆的行驶参数,该路段包括至少两条车道,该行驶参数包括车辆定位信息;根据该路段中各个车辆的车辆定位信息,分别 全部
背景技术:
在一般的交通场景中,比如在多车辆路段的车辆驾驶场景,通常是驾驶员参照周 围车辆的行驶状况,并根据自身的驾驶经验,判断和选择车辆是否超车或者是否减速等驾 驶策略,然而,如何能够提高车辆驾驶的安全性是亟待解决的技术问题。
技术实现要素:
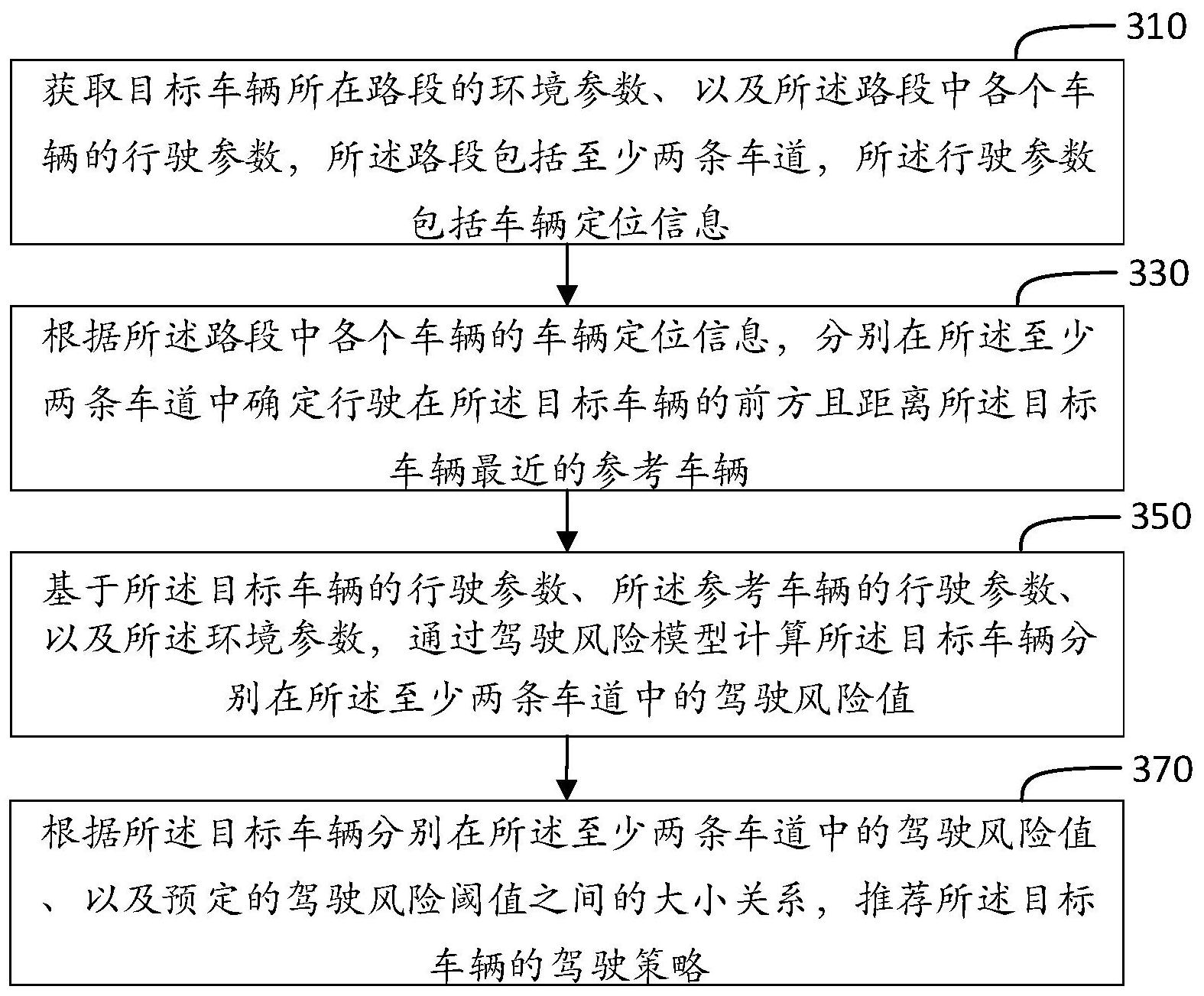
本申请的实施例提供了一种车辆驾驶策略的推荐方法、装置、计算机可读介质及 电子设备,进而至少在一定程度上可以提高车辆驾驶的安全性。 本申请的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本申请 的实践而习得。 根据本申请实施例的一个方面,提供了一种车辆驾驶策略的推荐方法,包括:获取 目标车辆所在路段的环境参数、以及所述路段中各个车辆的行驶参数,所述路段包括至少 两条车道,所述行驶参数包括车辆定位信息;根据所述路段中各个车辆的车辆定位信息,分 别在所述至少两条车道中确定行驶在所述目标车辆的前方且距离所述目标车辆最近的参 考车辆;基于所述目标车辆的行驶参数、所述参考车辆的行驶参数、以及所述环境参数,通 过驾驶风险模型计算所述目标车辆分别在所述至少两条车道中的驾驶风险值;根据所述目 标车辆分别在所述至少两条车道中的驾驶风险值、以及预定的驾驶风险阈值之间的大小关 系,推荐所述目标车辆的驾驶策略。 根据本申请实施例的一个方面,提供了一种车辆驾驶策略的推荐装置,包括:获取 单元,被用于获取目标车辆所在路段的环境参数、以及所述路段中各个车辆的行驶参数,所 述路段包括至少两条车道,所述行驶参数包括车辆定位信息;确定单元,被用于根据所述路 段中各个车辆的车辆定位信息,分别在所述至少两条车道中确定行驶在所述目标车辆的前 方且距离所述目标车辆最近的参考车辆;计算单元,被用于基于所述目标车辆的行驶参数、 所述参考车辆的行驶参数、以及所述环境参数,通过驾驶风险模型计算所述目标车辆分别 在所述至少两条车道中的驾驶风险值;推荐单元,被用于根据所述目标车辆分别在所述至 少两条车道中的驾驶风险值、以及预定的驾驶风险阈值之间的大小关系,推荐所述目标车 辆的驾驶策略。 在本申请的一些实施例中,基于前述方案,所述至少两条车道包括目标车道和相 邻车道,所述目标车辆行驶在所述目标车道,其中,所述相邻车道为与所述目标车道相邻的 车道。 在本申请的一些实施例中,基于前述方案,所述计算单元包括:预测单元,被用于 基于所述目标车辆的行驶参数和所述参考车辆的行驶参数,预测所述目标车辆在变道至相 5 CN 111605555 A 说 明 书 2/13 页 邻车道线时,所述目标车辆的预测行驶参数和所述参考车辆的预测行驶参数,所述相邻车 道线为所述目标车道和所述相邻车道之间的车道划分线;第一输入单元,被用于所述目标 车辆的预测行驶参数、所述参考车辆的预测行驶参数、以及所述环境参数输入驾驶风险模 型,得到所述目标车辆在所述相邻车道中的驾驶风险值;第二输入单元,被用于将所述目标 车辆的行驶参数、所述目标车道中参考车辆的行驶参数、以及所述环境参数输入驾驶风险 模型,得到所述目标车辆在所述目标车道中的第一驾驶风险值。 在本申请的一些实施例中,基于前述方案,所述预测单元配置为:确定所述目标车 辆从所述目标车道变道至所述相邻车道线所需要的变道时间;基于所述目标车辆的行驶参 数和所述参考车辆的行驶参数,以及所述变道时间,预测所述目标车辆在变道至所述相邻 车道线时,所述目标车辆的预测行驶参数和所述参考车辆的预测行驶参数。 在本申请的一些实施例中,基于前述方案,所述第一输入单元配置为:确定散落物 概率和散落物运动参数,所述散落物概率为所述目标车道中出现货车散落物的概率,所述 散落物运动参数包括散落物质量,所述散落物质量为由于货车散落物导致的历史交通事故 中的散落物的平均质量;将所述目标车辆的行驶参数、所述目标车道中参考车辆的散落物 运动参数、以及所述环境参数输入驾驶风险模型,得到所述目标车辆在所述目标车道中来 自所述货车散落物的驾驶风险值;将所述目标车辆的行驶参数、所述目标车道中参考车辆 的行驶参数、以及所述环境参数输入驾驶风险模型,得到所述目标车辆在所述目标车道中 来自所述参考车辆的驾驶风险值;基于所述来自所述货车散落物的驾驶风险值、散落物概 率、以及来自所述参考车辆的驾驶风险值,计算所述目标车辆在所述目标车道中的第一驾 驶风险值。 在本申请的一些实施例中,基于前述方案,所述相邻车道包括左相邻车道和右相 邻车道,所述目标车辆在所述相邻车道中的驾驶风险值包括所述目标车辆在所述左相邻车 道中的第二驾驶风险值和所述目标车辆在所述右相邻车道中的第三驾驶风险值。 在本申请的一些实施例中,基于前述方案,所述推荐单元配置为:当所述第一、第 二、以及第三驾驶风险值均大于所述驾驶风险阈值时,则推荐所述目标车辆降低车速;当所 述第一驾驶风险值大于所述驾驶风险阈值,所述第二或第三驾驶风险值小于所述驾驶风险 阈值时,则推荐所述目标车辆超车;当所述第一驾驶风险值小于所述驾驶风险阈值时,则推 荐所述目标车辆不超车。 在本申请的一些实施例中,基于前述方案,所述推荐单元配置为:当所述第二驾驶 风险值小于所述第三驾驶风险值时,则推荐所述目标车辆从所述左相邻车道超车;当所述 第三驾驶风险值小于所述第二驾驶风险值时,则推荐所述目标车辆从所述右相邻车道超 车。 在本申请的一些实施例中,基于前述方案,所述驾驶风险阈值包括至少两个子驾 驶风险阈值,所述推荐单元配置为:根据所述目标车辆分别在所述至少两条车道中的驾驶 风险值、以及所述至少两个子驾驶风险阈值之间的大小关系,推荐所述目标车辆的驾驶策 略。 在本申请的一些实施例中,基于前述方案,所述路段的环境参数包括道路粘度、道 路弯度、道路湿度、道路坡度、道路能见度、以及道路摩擦系数中的一个或多个。 在本申请的一些实施例中,基于前述方案,所述路段中各个车辆的行驶参数还包 6 CN 111605555 A 说 明 书 3/13 页 括车辆质量、车辆矢量速度、以及车辆加速度。 在本申请的一些实施例中,基于前述方案,所述车辆定位信息包括车辆GPS定位信 息、车辆北斗卫星定位信息、车辆二维坐标定位信息中的任意一个。 根据本申请实施例的一个方面,提供了一种计算机可读介质,其上存储有计算机 程序,所述计算机程序被处理器执行时实现如上述实施例中所述的车辆驾驶策略的推荐方 法。 根据本申请实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器; 存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执 行时,使得所述一个或多个处理器实现如上述实施例中所述的车辆驾驶策略的推荐方法。 在本申请的一些实施例所提供的技术方案中,首先获取目标车辆所在路段的环境 参数、以及所述路段中各个车辆的行驶参数,然后根据所述行驶参数中的车辆定位信息,分 别在所述至少两条车道中确定行驶在所述目标车辆的前方且距离所述目标车辆最近的参 考车辆,并通过驾驶风险模型计算所述目标车辆分别在所述至少两条车道中的驾驶风险 值,最后,根据所述目标车辆分别在所述至少两条车道中的驾驶风险值、以及预定的驾驶风 险阈值之间的大小关系,推荐所述目标车辆的驾驶策略。由于目标车辆在车道中的驾驶风 险值能体现出该目标车辆的在车道中的驾驶风险,因此,通过参照目标车辆在车道中的驾 驶风险值,以及预定的驾驶风险阈值之间的大小关系,能够推荐出科学合理的车辆驾驶策 略,故本申请的一些实施例所提供的技术方案能够提高车辆驾驶的安全性。 应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不 能限制本申请。 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施 例,并与说明书一起用于解释本申请的原理。显而易见地,下面描述中的附图仅仅是本申请 的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 这些附图获得其他的附图。在附图中: 图1示出了可以应用本申请实施例的技术方案的示例性系统架构的示意图; 图2示出了根据本申请的一个实施例的实施车辆驾驶策略的推荐方法的应用场景 图; 图3示出了根据本申请的一个实施例的车辆驾驶策略的推荐方法的流程图; 图4示出了根据本申请的一个实施例的计算所述目标车辆分别在所述至少两条车 道中的驾驶风险值的细节流程图; 图5示出了根据本申请的一个实施例的预测所述目标车辆的预测行驶参数和所述 参考车辆的预测行驶参数的细节流程图; 图6示出了根据本申请的一个实施例的所述目标车辆变道至所述相邻车道线的场 景示意图; 图7示出了根据本申请的一个实施例的在所述目标车道中的参考车辆为货运车辆 时,得到所述目标车辆在所述目标车道中的第一驾驶风险值的细节流程图; 图8示出了根据本申请的一个实施例的推荐所述目标车辆的驾驶策略的细节流程 7 CN 111605555 A 说 明 书 4/13 页 图; 图9示出了根据本申请的一个实施例的推荐所述目标车辆的驾驶策略的细节流程 图; 图10示出了根据本申请的一个实施例的基于云对车辆驾驶策略进行推荐的示意 图; 图11示出了根据本申请的一个实施例的车辆驾驶策略的推荐装置的框图; 图12示出了适于用来实现本申请实施例的电子设备的计算机系统的结构示意图。











