
技术摘要:
本发明提供基于非线性终端滑模方法的车队有限时间制动控制方法,涉及车队协同控制技术领域。该方法首先根据车辆运行情况,建立车队动力学模型;再构造车辆的固定间距误差,确定车队的控制目标;最后基于车辆的间距误差,选取非线性终端滑模面使车间距误差在有限时间内 全部
背景技术:
车队协同控制是指各车辆在行进的过程中通过车辆间的协同,保持合理的车间 距,以队列的形式平稳运行。与单独行驶车辆相比,车队行驶可以有效节省能耗,对减少交 通拥堵、改善环境污染具有重要的意义。 车队协同制动控制作为车队领域的重要分支,近年来受到越来越多的关注。协同 制动控制涉及到很多关键和复杂的控制任务,例如车辆间的协同(V2V),车辆和基础设施间 的协同(V2I)以及车辆和停车位置之间的协同。 在车辆协同制动领域中,Xu等人提出了一种基于非线性反馈的协同制动控制方 法,比较研究了不同的通信拓扑对车队安全的影响,揭示了车辆协同的内在联系;Iftekhar 等人将基于植绒理论提出的协同控制算法应用于行车道,换道和制动控制,并通过广泛的 仿真证明了该方法的有效性;Liu和Xu提出了一种分别考虑内部虚拟力和外部制动力情况 下的二阶车队模型,将车辆间的动态联系简化为三车之间的关系,并明确了协同制动控制 的目标,保证了车辆的稳定性。然而,对于车队来说,不仅要保证车辆的稳定性,还要保证车 队的整体稳定性,即串稳定性,车辆间的间距误差应避免逐步放大,否则容易发生车辆间的 碰撞事故。尽管目前有关于串稳定性的研究日益增多,在协同制动领域方面的研究却比较 少。由于滑模控制对外部扰动和模型不确定性具有鲁棒性和不敏感型,很多研究采用滑模 控制方法来解决串稳定性问题。在这方面,Li,Yongfu等人采用基于积分滑模协同制动控制 方法,分别设计分析了领队车和跟随车的控制器和收敛性,不仅可以保证单车稳定性,同时 车队的串稳定性也得以保证。但大部分相关研究都未考虑收敛速度,主要针对的是跟踪误 差的渐进收敛性,即控制目标在t→∞得以保证。保证控制任务能在有限时间内完成有十分 重要的现实意义,即有限时间收敛性。 目前同时考虑保证串稳定性和有限时间收敛的车队协同制动方面的研究比较少。 Li和Xu等人的研究主要是针对单车稳定性,并未考虑车队的整体稳定性,可能会出现间距 误差随着车辆的增多而逐步放大的情况,进而导致追尾等事故;Li虽然考虑了车队的整体 性,但未考虑有限时间收敛问题,可能会导致车辆不能在有限时间内停在目标位置的现象 (TSP)。
技术实现要素:
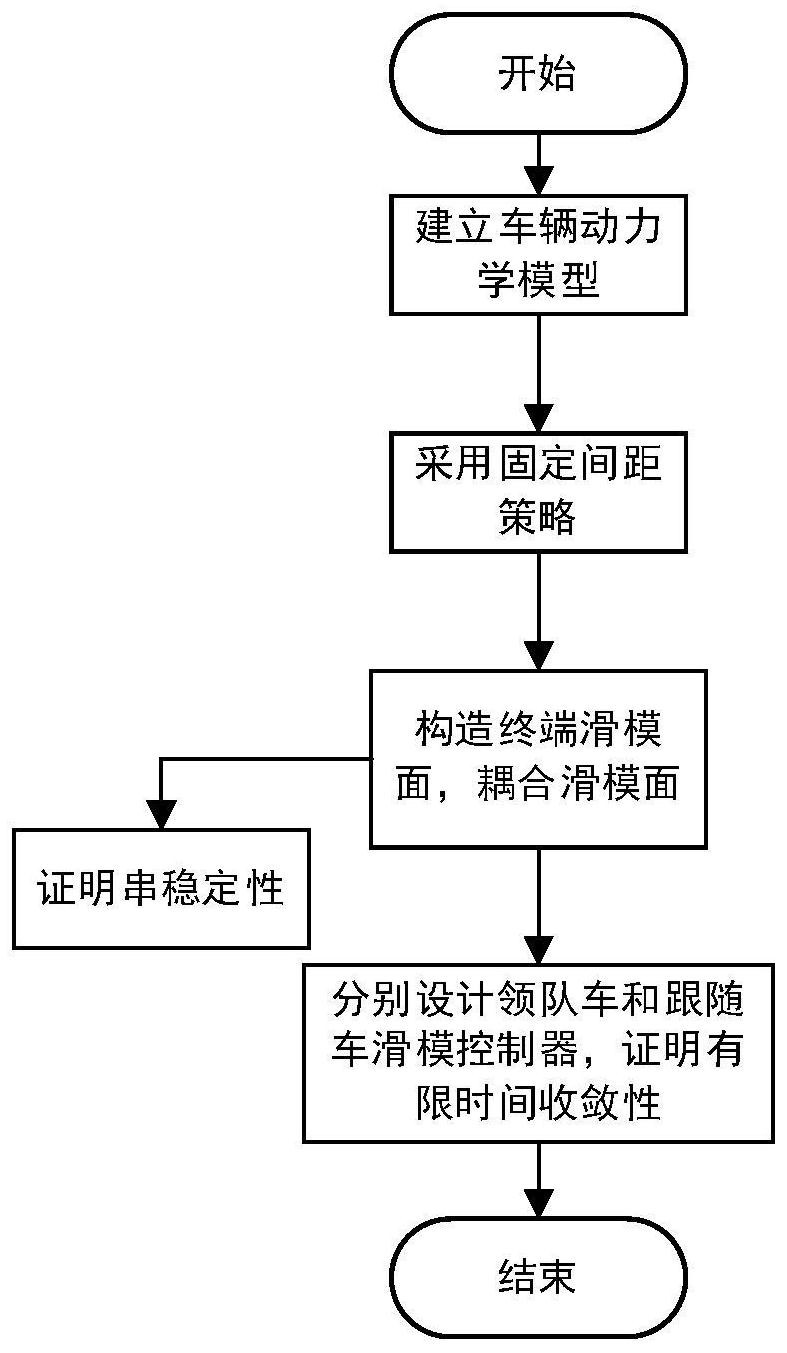
本发明要解决的技术问题是针对上述现有技术的不足,提供一种基于非线性终端 滑模方法的车队有限时间制动控制方法,基于终端滑模方法设计控制器,通过构建耦合滑 模面,保证车队的串稳定性;同时考虑有限时间收敛问题,通过保证跟踪误差在有限时间内 到达滑模面,使车辆在有限时间内停在指定的位置。 5 CN 111736473 A 说 明 书 2/9 页 为解决上述技术问题,本发明所采取的技术方案是:基于非线性终端滑模方法的 车队有限时间制动控制方法,包括以下步骤: 步骤1、根据车辆运行情况,建立车队动力学模型; 所述建立的车队动力学模型如下公式所示: 其中,xi(t)和vi(t)表示车队中第i辆车在t时刻的位置和速度信息,i=0,1,..., n,n 1为车队中车辆总数,ui(t)表示第i辆在t时刻的控制输入,ξi(t)表示外部扰动,并设定 扰动是有界的,即 ξi和 分别表示扰动的下界和上界; 步骤2、构造车辆的固定间距误差,确定车队的控制目标; 所述车辆固定的间距误差如下公式所示: ei(t)=xi-1(t)-xi(t)-δ-L 其中,xi-1(t)为t时刻第i-1辆车的位置信息,i=1,...,n,δ为期望车间距,L为车 长; 则确定车队的控制目标为:通过设计控制器,使领队车停在期望位置,跟随车收敛 到相同的间距误差,如下公式所示: 其中,x0(t)和v0(t)分别为领队车在t时刻的位置和速度信息,q0为领队车期望的 停车位置; 步骤3、基于车辆的间距误差,选取非线性终端滑模面使车间距误差在有限时间内 收敛,并考虑外部扰动,分别设计领队车控制器和跟随车控制器,实现车队的控制目标; (1)设计领队车控制器的具体方法为: 领队车期望的停车位置为q0,到达停车位置时速度为0,设定领队车到达期望的停 车地点的状态为虚拟头车信息,如下公式所示: e0(t)=q0-x0(t) 其中,x0(t)领队车的位置信息,e0(t)为领队车距离期望停车点的间距误差; 选取非线性终端滑模面使车间距误差在有限时间内收敛,如下公式所示: 其中,si(t)为滑模面的表达式,sign( )为符号函数,ci为正常数; 同时,为了保证车队串稳定性,引进了新的耦合滑模面,如下公式所示: 其中,Si(t)为耦合的滑模面,q≠0为常数; 进而基于李雅普诺夫方法,设计领队车的控制器,如下公式所示: 6 CN 111736473 A 说 明 书 3/9 页 其中,u0(t)为领队车t时刻的控制输入,k为正常数, 和 为领队车t时刻所 受到扰动的估计扰动误差,满足 和ξ0(t)为领队车t时刻所受到扰 动的上界和下界, 和 为领队车t时刻所受到扰动的上界估计值和下界估计值,μ0 的值与q和S0(t)有关,满足: (2)设计跟随车控制器的具体方法为: 基于李雅普诺夫方法,设计跟随车控制器,如下公式所示: 其中, 其中,ui(t)为第i辆车t时刻的控制输入,k为正常数, 和ξi(t)为第i辆车t时 刻所受到扰动的上界和下界, 和 为第i辆车t时刻所受到扰动的上界估计值和下界 估计值, 和 为第i辆车t时刻所受到扰动的估计扰动误差,三者满足 和 为第i辆车t时刻所受到扰动的上界和下界估计扰动误差的最大值,满足 以下条件: 扰动自适应律为: 其中,ηi>0的常数,μi定义如下 7 CN 111736473 A 说 明 书 4/9 页 采用上述技术方案所产生的有益效果在于:本发明提供的基于非线性终端滑模方 法的车队有限时间制动控制方法,基于终端滑模方法设计控制器,通过构建耦合滑模面,保 证了车队的串稳定性;同时考虑了有限时间收敛问题,通过保证跟踪误差在有限时间内到 达滑模面,使车队中车辆可以在有限时间内停在指定的位置。 附图说明 图1为本发明实施例提供的车队模型及所用拓扑图; 图2为本发明实施例提供的基于非线性终端滑模方法的车队有限时间制动控制方 法的流程图; 图3为本发明实施例提供的不同扰动状态下车队中各车辆不同时刻的位置信息曲 线图,其中,(a)为无扰动时车队中各车辆不同时刻的位置信息,(b)为领队车受到扰动时车 队中各车辆不同时刻的位置信息,(c)车队中所有车均受到扰动时各车辆不同时刻的位置 信息; 图4为本发明实施例提供的不同扰动状态下车队中各车辆不同时刻的速度信息曲 线图,其中,(a)为无扰动时车队中各车辆不同时刻的速度信息,(b)为领队车受到扰动时车 队中各车辆不同时刻的速度信息,(c)车队中所有车均受到扰动时各车辆不同时刻的速度 信息; 图5为本发明实施例提供的不同扰动状态下车队中各车辆不同时刻的控制输入信 息曲线图,其中,(a)为无扰动时车队中各车辆不同时刻的控制输入信息,(b)为领队车受到 扰动时车队中各车辆不同时刻的控制输入信息,(c)车队中所有车均受到扰动时各车辆不 同时刻的控制输入信息; 图6为本发明实施例提供的不同扰动状态下车队中各车辆的间距误差曲线图,其 中,(a)为无扰动时车队中各车辆不同时刻的间距误差,(b)为领队车受到扰动时车队中各 车辆不同时刻的间距误差,(c)车队中所有车均受到扰动时各车辆不同时刻的间距误差。











