
技术摘要:
本公开提供了一种远程手术的控制方法、控制装置及手术系统,其中,该控制方法包括以下步骤:获取位于模拟机械臂远端的模拟执行器在当前模拟位置的状态信息;采集实际执行器在所述当前模拟位置对应的当前实际位置的阻力信息;基于所述状态信息和所述阻力信息,生成触觉 全部
背景技术:
远程手术通过虚拟现实技术与网络技术结合,可以使得医生亲自对远程的患者进 行一定的操作;具体地,医生根据实际手术端传来的现场影像来进行手术操作,其一举一动 可转化为数字信息传递至实际手术端,以控制实际手术端的医疗器械进行动作,达到为患 者进行手术的目的。 通常,在远程手术过程中,通过摄像头和医学影像设备为医生提供实际手术端的 视觉信息,以便于医生基于实际手术端的视觉信息利用遥控器或触摸屏为实际手术端的患 者进行手术。由于远程手术过程中,医生无法直接接触患者,无法获取触觉信息,导致远程 手术的效率较低。
技术实现要素:
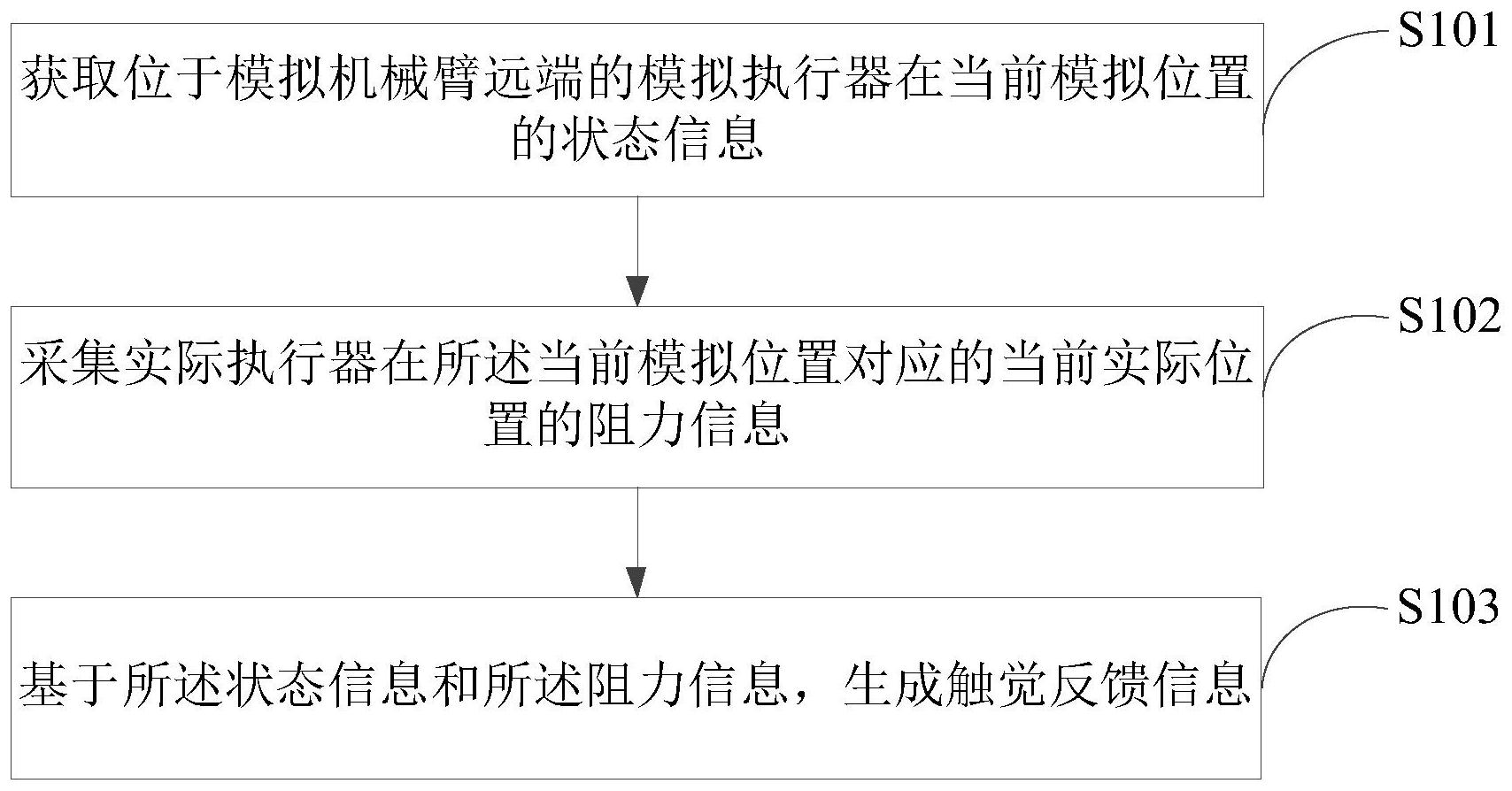
有鉴于此,本公开的目的在于提供一种远程手术的控制方法、控制装置及手术系 统,以解决现有技术中医生在远程手术过程中无法获取触觉信息,导致远程手术的效率较 低的问题。 第一方面,本公开提供了一种远程手术的控制方法,其中,包括以下步骤: 获取位于模拟机械臂远端的模拟执行器在当前模拟位置的状态信息; 采集实际执行器在所述当前模拟位置对应的当前实际位置的阻力信息; 基于所述状态信息和所述阻力信息,生成触觉反馈信息。 在一种可能的实施方式中,所述模拟机械臂包括串联的多个关节,所述获取位于 模拟机械臂远端的模拟执行器在当前模拟位置的状态信息,包括: 采集所述模拟机械臂的每个所述关节在所述当前模拟位置的第一运动信息; 基于所述第一运动信息获取所述模拟执行器在所述当前模拟位置的所述状态信 息,所述状态信息至少包括位置信息。 在一种可能的实施方式中,在所述获取位于模拟机械臂远端的模拟执行器在当前 模拟位置的状态信息之后,还包括: 基于所述状态信息控制所述实际执行器移动到与所述当前模拟位置对应的当前 实际位置。 在一种可能的实施方式中,所述基于所述状态信息和所述阻力信息,生成触觉反 馈信息,包括: 基于所述状态信息和所述阻力信息,确定每个所述关节的第二运动信息; 基于所述第二运动信息控制对应的所述关节。 在一种可能的实施方式中,所述第一运动信息或所述第二运动信息为旋转控制 4 CN 111599459 A 说 明 书 2/13 页 量。 第二方面,本公开还提供了一种远程手术的控制装置,其中,包括: 获取模块,用于获取位于模拟机械臂远端的模拟执行器在当前模拟位置的状态信 息; 采集模块,用于采集实际执行器在所述当前模拟位置对应的当前实际位置的阻力 信息; 生成模块,用于基于所述状态信息和所述阻力信息,生成触觉反馈信息。 在一种可能的实施方式中,所述模拟机械臂包括串联的多个关节,所述获取模块 包括: 采集单元,用于采集所述模拟机械臂的每个所述关节在所述当前模拟位置的第一 运动信息; 获取单元,用于基于所述第一运动信息获取所述模拟执行器在所述当前模拟位置 的所述状态信息,所述状态信息至少包括位置信息。 在一种可能的实施方式中,所述控制装置还包括: 控制模块,用于基于所述状态信息控制所述实际执行器移动到与所述当前模拟位 置对应的当前实际位置。 在一种可能的实施方式中,所述生成模块包括: 确定单元,用于基于所述状态信息和所述阻力信息,确定每个所述关节的第二运 动信息; 控制单元,用于基于所述第二运动信息控制对应的所述关节。 在一种可能的实施方式中,所述第一运动信息或所述第二运动信息为旋转控制 量。 第三方面,本公开还提供了一种手术系统,其包括模拟机械臂、模拟执行器、实际 执行器以及控制装置,所述模拟执行器设置在所述模拟机械臂的远端,所述控制装置配置 地获取所述模拟执行器在当前模拟位置的状态信息、采集所述实际执行器在所述当前模拟 位置对应的当前实际位置的阻力信息并基于所述状态信息和所述阻力信息生成触觉反馈 信息。 在一种可能的实施方式中,所述模拟机械臂包括串联的多个关节,每个所述关节 设置对应的编码器和驱动装置,所述编码器配置地采集所述关节的运动信息。 在一种可能的实施方式中,相邻的所述关节之间通过连杆连接。 在一种可能的实施方式中,所述驱动装置为电机。 第四方面,本公开还提供了一种计算机可读存储介质,其中,该计算机可读存储介 质上存储有计算机程序,该计算机程序被处理器运行时执行如所述的控制方法的步骤。 第五方面,本公开还提供了一种电子设备,其中,包括:处理器、存储器和总线,所 述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所 述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如所述的控制方 法的步骤。 本公开实施例利用模拟机械臂远端的模拟执行器能够实时给医生以触觉反馈信 息,进而提高医生的手术效率;还能够使得医生基于触觉反馈信息对手术进行评估,确保手 5 CN 111599459 A 说 明 书 3/13 页 术的安全性。 为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合 所附附图,作详细说明如下。 附图说明 为了更清楚地说明本公开或现有技术中的技术方案,下面将对实施例或现有技术 描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开中 记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可 以根据这些附图获得其他的附图。 图1示出了本公开所提供的一种远程手术的控制方法的流程图; 图2示出了本公开所提供的一种远程手术的控制方法中获取位于模拟机械臂远端 的模拟执行器在当前模拟位置的状态信息的流程图; 图3示出了本公开所提供的一种远程手术的控制方法中基于所述状态信息和所述 阻力信息,生成触觉反馈信息的流程图; 图4示出了本公开所提供的一种远程手术的控制装置的结构示意图; 图5示出了本公开所提供的一种手术系统中模拟机械臂和模拟执行器的结构示意 图; 图6示出了本公开所提供的一种电子设备的结构示意图。 附图标记: 401-获取模块;402-采集模块;403-生成模块;404-控制模块;51-模拟机械臂;52- 模拟执行器;511-关节;J1-第一关节;J2-第二关节;J3-第三关节。











