
技术摘要:
本发明提供了一种具有径向活检采样功能的磁驱动胶囊内窥镜机器人,包括图像采集模块,径向活检功能模块,电子元件模块,径向活检功能模块包括磁驱动器和活检工作头,磁驱动器包括永磁体,通过施加外磁场使永磁体产生旋转,驱动活检工作头由径向伸出,撤去外磁场之后, 全部
背景技术:
胶囊内窥镜是一种医学检查设备,主要用于采集人体消化道的图像以供医生评估 消化道的健康程度。相较于传统的柔性内窥镜,胶囊内窥镜的优势在于能够观察患者整个 消化道的情况,并且给患者造成的痛苦小,在临床中已经得到了较为广泛的应用。然而,现 有的胶囊内窥镜功能还较为单一,目前仅限于图像的采集功能。但是在实际应用中有许多 疾病不能够单靠图像信息确诊,临床中往往会对不确定的病灶组织进行取活检操作。因此, 目前已有许多的相关研究致力于在现有胶囊内窥镜中集成活检模块,以拓展其功能。 已有的一些研究中往往使用电机来驱动活检装置,但电机属于体积大,功耗大的 设备。因此会导致难以控制胶囊内窥镜的体积,并且电机大量消耗内置电池的能量,会影响 整体续航时间。其它一些研究中尝试采用扭力弹簧等蓄能装置来驱动活检装置,但种方法 的缺点是活检模块的采样运动只能进行一次,蓄能装置一经触发就不能再次使用。若首次 采样失败,则无法再次尝试。针对这些问题,目前研究的新方向是如何利用磁场在患者体外 远程对活检装置进行驱动。
技术实现要素:
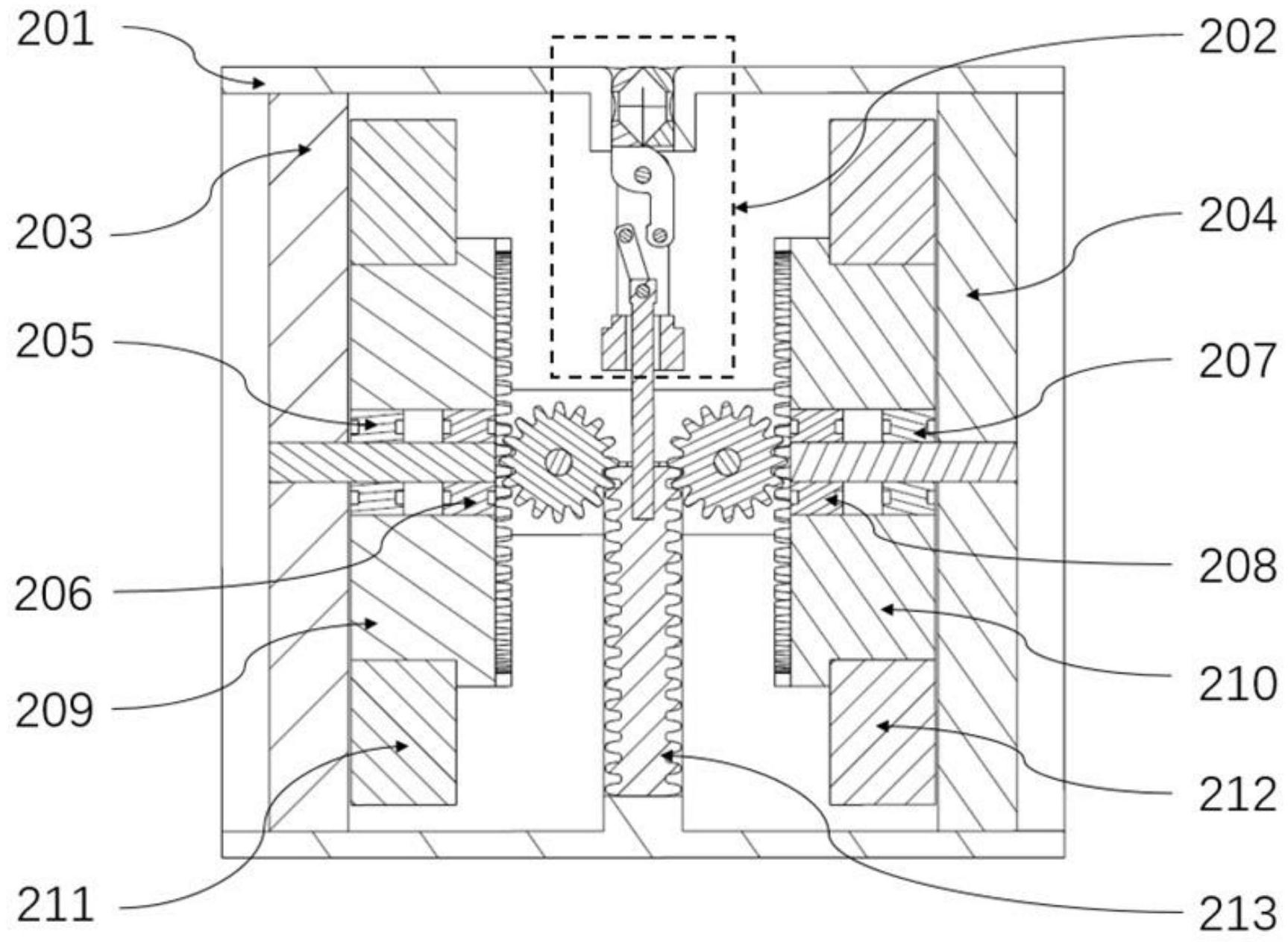
为了解决现有技术中的问题,本发明提供了一种具有径向活检采样功能的磁驱动 胶囊内窥镜机器人。 本发明提供了一种具有径向活检采样功能的磁驱动胶囊内窥镜机器人,包括图像 采集模块,径向活检功能模块,电子元件模块,所述径向活检功能模块包括磁驱动器、将旋 转运动转化为直线往复运动的传动机构和采集活体组织的活检工作头,所述磁驱动器通过 所述传动机构与所述活检工作头连接,所述磁驱动器包括内置的永磁体,通过施加外磁场 使永磁体产生旋转,经传动机构的传动之后,驱动活检工作头由径向伸出,撤去外磁场之 后,活检工作头回收,完成活检采样的过程。 作为本发明的进一步改进,所述永磁体为径向充磁的圆环型永磁体。 作为本发明的进一步改进,所述径向活检功能模块还包括壳体组件和传动轴,所 述传动机构包括冠齿轮、第一圆柱齿轮、第二圆柱齿轮和齿条,所述永磁体固定在所述冠齿 轮上,所述冠齿轮与所述壳体组件旋转连接,所述第一圆柱齿轮、第二圆柱齿轮分别固定在 所述传动轴上,所述传动轴与所述壳体组件旋转连接,所述冠齿轮与所述第一圆柱齿轮相 啮合,所述第二圆柱齿轮与所述齿条相啮合,所述齿条与所述活检工作头连接,所述齿条与 所述壳体组件构成移动副。 作为本发明的进一步改进,所述壳体组件包括圆柱形壳体和位于所述圆柱形壳体 两端的圆盘形底座,所述圆盘形底座的圆心处旋转连接有冠齿轮转动轴,所述冠齿轮与所 3 CN 111588335 A 说 明 书 2/6 页 述冠齿轮转动轴旋转连接,所述传动轴的两端分别与所述圆柱形壳体旋转连接。 作为本发明的进一步改进,所述冠齿轮转动轴沿所述圆柱形壳体的轴向设置,所 述传动轴沿所述圆柱形壳体的径向设置。 作为本发明的进一步改进,所述永磁体和所述传动机构均有两组并且镜像布置。 作为本发明的进一步改进,所述齿条上设有矩形凸台,所述圆柱形壳体上设有矩 形凹槽,所述矩形凸台与所述矩形凹槽构成接触直线副,所述圆柱形壳体上设有沿其径向 设置的径向凸台,所述径向凸台设有径向通孔,所述径向通孔与所述活检工作头构成接触 直线副。 作为本发明的进一步改进,所述活检工作头为活检钳。 作为本发明的进一步改进,所述活检钳包括第一钳头、第二钳头、基座和推进组 件,所述第一钳头、第二钳头的中部铰接,所述第一钳头、第二钳头的铰接处与所述基座固 定连接,所述齿条通过所述推进组件分别与所述第一钳头、第二钳头的尾部铰接,所述第一 钳头、第二钳头的头部均设有边缘锋利的凹槽。 作为本发明的进一步改进,所述推进组件包括推杆、第一连杆和第二连杆,所述推 杆的一端与所述齿条固定连接,所述推杆的另一端分别与所述第一连杆、第二连杆的一端 铰接,所述第一连杆的另一端与所述第二钳头的尾部铰接,所述第二连杆的另一端与所述 第一钳头的尾部铰接。 作为本发明的进一步改进,所述基座的前部与所述径向凸台的径向通孔为间隙配 合,所述基座的尾部直径大于所述径向凸台的径向通孔的孔径。 作为本发明的进一步改进,所述冠齿轮呈二级阶梯形状,具有中心通孔特征。冠齿 轮直径较大的端面布置有直齿,用于齿轮啮合。直径较小的部分用于与永磁体内圆过盈配 合,从而固定永磁体。配合要求永磁体不能相对于冠齿轮发生松动,永磁体端面与冠齿轮直 径较小部分的端面平齐。所述冠齿轮的中心通孔两端各与一个大轴承的外圈形成轴孔配 合。冠齿轮转动轴采用圆柱短轴,圆柱短轴与冠齿轮上的两个大轴承的内圈形成轴孔配合。 这样冠齿轮绕圆柱短轴构成一个旋转运动副。圆盘形底座具有中心通孔特征。所述圆柱短 轴一端与圆盘形底座的中心通孔过盈配合,将上述旋转运动副固定于圆盘形底座之上。其 中冠齿轮带齿端面相对圆盘形底座朝外,直径较小部分的端面相对圆盘形底座朝内并与圆 盘形底座端面之间留有间隙。上述圆盘形底座与旋转运动副共有两个,镜像布置在径向活 检功能模块的两端。所述圆盘形底座与圆柱形壳体之间使用过盈配合固定。传动轴采用圆 柱长轴,圆柱长轴共两根,呈对称布置。一侧的圆柱长轴两端各与一个小轴承的内圈形成轴 孔配合。所述小轴承外圈与圆柱形壳体的圆孔凹槽特征构成轴孔配合。所述圆柱齿轮通过 轴孔配合安装于圆柱长轴上。在圆柱长轴的中心位置和一端靠近轴承位置各布置一个圆柱 齿轮,即第一圆柱齿轮和第二圆柱齿轮。其中靠近轴承位置的第一圆柱齿轮与冠齿轮的端 面齿啮合形成齿轮传动副。中心位置的第二圆柱齿轮与齿条啮合构成齿轮齿条传动副。另 一侧的圆柱长轴按相同的转动方式传递运动至齿条。这里不再赘述。所述齿条为直线型。左 右各布置一列啮合齿特征,前后各有一矩形凸台特征,一端带有沉孔特征。矩型凸台与圆柱 形壳体的矩形凹槽特征之间构成接触直线副。 作为本发明的进一步改进,所述活检工作头包括但不限于活检钳。可以是活检针 等其他可通过直线往复运动采集活体组织的工作头。 4 CN 111588335 A 说 明 书 3/6 页 作为本发明的进一步改进,所述活检工作头的伸出方向可通过改变所施加的外磁 场的方向而改变,以达到精准采样的目的。 作为本发明的进一步改进,所述永磁体包括但不限于圆环型,永磁体材料包括但 不限于钕铁硼材料。 作为本发明的进一步改进,所述径向活检功能模块中的圆柱形壳体,圆盘形底座, 齿轮(主要包括冠齿轮、第一圆柱齿轮、第二圆柱齿轮和齿条)等零件由非磁性的材料加工 而成。 作为本发明的进一步改进,所述磁驱动胶囊内窥镜机器人的头部材料为透明材 质,以便于进行图像的采集。 本发明的有益效果是:在胶囊内窥镜机器人中增加了活检模块使其具备了活检功 能,可以利用磁场在患者体外远程对径向活检功能模块进行驱动,以实现活检采样,径向活 检功能模块的驱动能量全部由外磁场远程提供,无需消耗胶囊内置电池的能量;通过多次 施加外磁场,可以使径向活检功能模块反复运行,可有效提高采样的成功率。 附图说明 图1是本发明一种具有径向活检采样功能的磁驱动胶囊内窥镜机器人的整体外形 图。 图2是本发明一种具有径向活检采样功能的磁驱动胶囊内窥镜机器人的分解示意 图。 图3是本发明一种具有径向活检采样功能的磁驱动胶囊内窥镜机器人的径向活检 功能模块的正视剖视图。 图4是本发明一种具有径向活检采样功能的磁驱动胶囊内窥镜机器人的径向活检 功能模块的俯视剖视图。 图5是本发明一种具有径向活检采样功能的磁驱动胶囊内窥镜机器人的圆柱形壳 体的正视剖视图。 图6是本发明一种具有径向活检采样功能的磁驱动胶囊内窥镜机器人的圆柱形壳 体的俯视剖视图。 图7是本发明一种具有径向活检采样功能的磁驱动胶囊内窥镜机器人的活检钳的 初始闭合状态图。 图8是本发明一种具有径向活检采样功能的磁驱动胶囊内窥镜机器人的活检钳的 伸出张开状态图。 图9是本发明一种具有径向活检采样功能的磁驱动胶囊内窥镜机器人的驱动初始 状态图。 图10是本发明一种具有径向活检采样功能的磁驱动胶囊内窥镜机器人的驱动完 成状态图。











