
技术摘要:
本发明提供一种船舶清洗机器人及清洗方法,包括清洗装置、驱动装置及控制器,其特点是:有3个旋转式清洗盘呈正三角形分布,并安装在底盘上,旋转式清洗盘内设有空化射流喷头。密封舱固定在底盘的上,两个水平推动器固定在底盘的上平面上,且位于密封舱的两侧,3个竖直 全部
背景技术:
船舶是海上交通运输的主要工具,由于海水的强腐蚀性和海洋生物的强附着力, 使得船体表面附着难以清除的贝类、海藻、锈皮和锈斑等,导致船舶速度下降10%至50%,使 船舶消耗更多的燃油,极大的增加了运输成本。为了延长船舶的使用寿命,降低油耗,保证 船舶的安全运行,船舶必须定期进坞进行船体表面清理。 目前,国内外的船舶清洗通常有以下几种方法: 在船体表面涂刷挥发性较慢的毒性油漆,阻止浮游生物的附着,以达到降低燃油消耗 量的效果。但油漆的强毒性也对沿航线的其他生物造成了不同程度的伤害,破坏了局部海 洋生态环境。因此,国际上已经严令禁止使用各种毒性油漆。 此外,在船体表面粘贴保护膜,在一定时间内将保护膜揭起以达到清除浮游生物 的目的。这种方法需要频繁操作,工作量大、代价也高,已渐渐地被市场所淘汰。 在我国,目前船体表面清洗主要采用人工喷砂处理,清洗效果比较明显,但工人劳 动强度大,效率低下,且对人体及环境有相当大的污染。 高压水射流船舶清洗技术则是近30年发展起来的新技术,它以水射流为主,利用 高压泵打出高压水,经管道到喷嘴,喷嘴则把高压低流速的水转化成低压高流速、高能量密 度的水射流,正向或切向冲击被清洗表面,从而将船体表面结垢物剥离,完成清洗作业。该 技术能耗低,污染轻,工人作业环境和劳动强度均有所改善。 空化射流技术是一种更为先进的水射流船舶清洗技术,将空化机理与水射流技术 相结合,人为地在水射流内增加空泡数量,利用大量空泡破裂产生的强大冲击力来增强射 流的作业效果。与非空化的射流相比,在同等泵压和流速情况下,空化射流的作业效率和效 果远远超出非空化射流,因此,空化射流技术现在应用到了清洗、除锈、切割等领域,具有高 效、环保、节能、安全可靠等优点。 以往上述各种船舶清洗工作均由人工完成,近年来随着人工智能技术的发展,采 用空化射流技术的船舶清洗机器人应运而生,在本发明做出以前,船舶清洗机器人主要为 方形结构,吸附方式以推力吸附为主,推进方式比较单一,因此,前进阻力大,越障能力较 差、重复作业及遗漏作业较多。如中国专利(申请号:201810445027.X)公布了一种面向海洋 附着物的水下清洗机器人系统,包括水上动力控制承载平台和水下机器人,所述水下机器 人上安装有控制阀组和驱动机构,所述水下机器人的底部设有空化水射流喷嘴,所述水上 动力控制承载平台分别与控制阀组、驱动机构和空化水射流喷嘴相连接,所述水上动力控 制承载平台的出水端与控制阀组的进水端连接。该系统的外形为方形结构,并且在机器人 两侧面设置了两个气囊,进一步加大了行走过程中受到的阻力;吸附方式上采用喷水推进 器,推进方式单一,并且设置了四个爬行轮,降低了机器人行走的稳定性。 4 CN 111605676 A 说 明 书 2/6 页
技术实现要素:
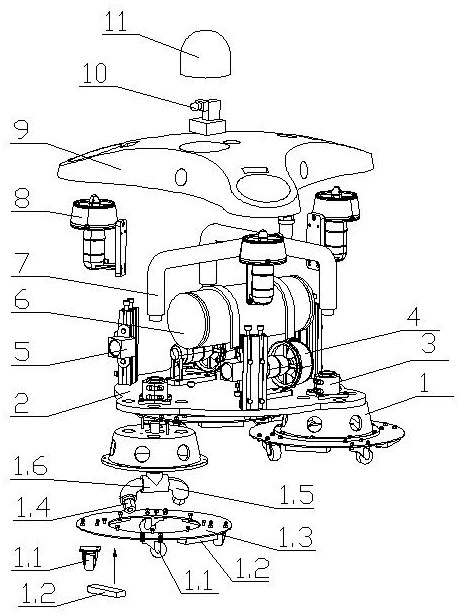
本发明为解决现有技术存在的上述问题,提供一种船舶清洗机器人及清洗方法, 便于模块布放,改善吸附方式和推进方式,减少前进阻力,提高越障能力,对船舶表面进行 探伤,实现工作区域的无重复全覆盖作业,提高清洗效率。 本发明的目的是通过以下技术方案实现的: 一种船舶清洗机器人,包括旋转式清洗盘、空化射流喷头及其供水管路、底盘、推动器、 密封舱、浮体及控制器,所述控制器安装在所述密封舱内,其特征在于,有3个所述旋转式清 洗盘呈正三角形分布,并安装在所述底盘的下平面上,每个旋转式清洗盘内均设置有所述 空化射流喷头;所述密封舱固定在所述底盘的上平面的中部,所述的推动器包括两个水平 推动器和3个竖直推动器,两个水平推动器固定在所述底盘的上平面上,且位于所述密封舱 的两侧,3个所述竖直推动器呈正三角形分布,并固定在所述底盘上,且与3个旋转式清洗盘 交错排列;所述的浮体为正三角形,在所述浮体的三个角上开设通孔;所述浮体与底盘连 接,且使浮体的三个角上的通孔分别对准3个所述竖直推动器。 对上述技术方案的改进:所述的旋转式清洗盘包括圆桶状的盘罩及圆环形的底 板,所述盘罩的开口朝下,所述的盘罩底部设置的翻边上开设安装孔,所述盘罩用螺栓通过 翻边上的安装孔固定在所述底板的环面上,且盘罩的中心与底板的中心设置同一直线上, 所述盘罩顶部固定在所述底盘上;在所述底板的底面上安装有万向轮和永磁铁,所述万向 轮与永磁铁交错分布。 对上述技术方案的进一步改进:所述供水管路包括在所述盘罩上方设置的分水 管、水管接头以及在所述盘罩内设置的分水连接管、三通管接头,所述三通管接头两端的接 口各与一个所述空化射流喷头连接,所述空化射流喷头喷口的喷射方向与所述底板的表面 呈锐角,且所述三通管接头两端的两个所述空化射流喷头的喷口朝向相反;所述三通管接 头的上接口与所述水管接头连接,所述底盘上设置3个旋转连接件,且呈正三角形分布,3个 所述的旋转连接件与3个所述竖直推动器交错排列;所述盘罩顶面中部开设通孔,所述的水 管接头穿过盘罩上的通孔与对应位置上的所述旋转连接件下端转动连接;所述分水管包括 主管路和3根分支管,在浮体内部开有管路通道,分水管的主管路和3根分支管从所述管路 通道中穿过,3根分支管分别与3个旋转连接件的上端连接,使所述浮体与底盘连接为一体。 对上述技术方案的进一步改进:还包括有传感器组件,所述传感器组件包括:用于 检测密封舱密封性以及防止电路板过热的温湿度传感器、用于调整船舶清洗机器人姿态的 姿态传感器、用于判断上下水深边界的水深传感器和用于判断船舶边缘的光电传感器,所 述温湿度传感器、姿态传感器及水深传感器均置于所述密封舱内部,所述光电传感器置于 密封舱外部,所述传感器组件中的各种传感器分别与所述控制器连接。 对上述技术方案的进一步改进:所述的3个竖直推动器各自用支撑杆垂直固定在 底盘上,在各支撑杆上各设置一探照灯;在所述的浮体的上方设置有摄像头,所述摄像头用 半球形透明密封罩覆盖。 对上述技术方案的进一步改进:在所述的底盘上开设若干个圆孔,在所述盘罩的 顶面和侧壁上各开设若干个通孔。 本发明一种上述船舶清洗机器人的清洗方法,其特征在于,清洗方法包括如下步 骤: 5 CN 111605676 A 说 明 书 3/6 页 P1:主程序:控制器使三个旋转式清洗盘内的空化射流喷头上电,并初始化各电器部件 使其工作;竖直推动器和永磁铁的复合吸附作用保证了船舶清洗机器人吸附在船体表面, 在水平推动器的推进下船舶清洗机器人沿设定路径边喷水边行进,并采集所述传感器组件 中的各种传感器的数据,当数据偏离正常值时启动相应中断程序:P2:控制器采集姿态传感 器反馈的姿态数据,当船舶清洗机器人偏离既定行进方向2°时,启动姿态矫正中断程序 P21; P3: 控制器采集所述水深传感器反馈的水深数据,当水深传感器检测到船舶清洗机器 人清刷至上边界或下边界时,启动水深边界中断程序P31;P4: 控制器采集所述光电传感器 反馈的距离数据,当光电探测器检测到船舶清洗机器人移至左右边缘时,启动船舶边缘中 断程序P41。 P5:控制器检测到电机有较大输出功率而船舶清洗机器人无位移时,则启动越障 中断程序P51。 对上述清洗方法的改进:所述的姿态矫正中断程序P21包括:矫正船舶清洗机器人 的行进方向,然后返回主程序继续清洗;所述的水深边界中断程序P31包括:控制船舶清洗 机器人停止清洗,向左或向右平移一个机位,然后返回主程序继续清洗;所述的船舶边缘中 断程序P41包括:控制船舶清洗机器人停止前进,判断船舶清洗机器人处于上水深边界还是 下水深边界,进行转向后返回主程序继续清洗;所述的越障中断程序P51包括:控制船舶清 洗机器人使用垂直推进器将船舶清洗机器人推离船体表面,前进一段距离后再吸附到船体 表面,返回主程序继续清洗。 对上述清洗方法的进一步改进:所述清洗方法还包括船舶清机器人的清洗路径及 空化射流参数的选择基于深度学习的图像识别功能,具体步骤包括:(1)上位机通过摄像头 所拍摄的画面判断污物附着程度,选择合适的水压以降低能耗;(2)在多机器工作时,上位 机通过摄像头判断当前路径是否为已清洗区域,无需外加复杂的水下通信设备来实现多机 器协作。 本发明与现有技术相比的优点和积极效果是: 1、本发明将空化射流技术与旋转式清洗盘结合起来,利用射流的反作用力,在旋转式 清洗盘内部形成水射流圈,为空泡的生长提供一个低压环境,提高了清洗效率; 2、本发明中的水平推进器和竖直推进器能够有效控制靶距,充分发挥空化射流清洗技 术高效节能的优点,通过两种推进器使得机器人能够实现转向、前进、后退、上浮及下沉,以 实现船体表面的路径遍历,竖直推进器还用于提供吸附力; 3、本发明打破了传统船舶清洗机器人的方形外观结构的设计思路,创新性地提出了双 三角形的结构设计,垂直推进器与清洗盘的错位式双三角形布局使整体结构趋向扁平化, 便于模块布放,缩短了重心与浮心的距离,减少了前进阻力,有利于机器人姿态调整,实现 工作区域的无重复全覆盖作业;同时,也有利于机器人功能的拓展,如可在机器人添加仪器 对船舶表面进行探伤。 4、本发明采用推力吸附为主、磁吸附为辅的复合吸附方式,在保证吸力的同时,提 高了越障能力。 5、本发明船舶清洗机器人的清洗方法,提高了清洗效率,清洗效果好;另外,还具 有船舶清机器人的清洗路径及空化射流参数的选择基于深度学习的图像识别功能,在多机 6 CN 111605676 A 说 明 书 4/6 页 器工作时,上位机通过摄像头判断当前路径是否为已清洗区域,无需外加复杂的水下通信 设备来实现多机器协作。 附图说明 图1为本发明一种船舶清洗机器人的装配分解示意图; 图2为本发明一种船舶清洗机器人另一视角的装配分解示意图; 图3为本发明一种船舶清洗机器人的整体结构立体图; 图4为本发明一种船舶清洗机器人中旋转式清洗盘的装配分解示意图; 图5为本发明一种船舶清洗机器人中旋转式清洗盘的仰视图; 图6为本发明一种船舶清洗机器人的清洗控制方法流程图。 图中编号为:1-旋转式清洗盘、1.1-万向轮、1.10-通孔、1.2-永磁铁、1.3-底板、 1.4-空化射流双喷头、1.5-分水连接管、1.6-三通管接头、1.7-安装孔、1.8-盘罩、1.9-水管 接头、2-底盘、2.1-圆孔、3-旋转连接件、4-水平推动器、5-探照灯、6-密封舱、7-分水管、8- 竖直推动器、8.1-支撑杆、9-浮体、10-摄像头、11-半球形密封罩。











