
技术摘要:
本发明提供了一种电机控制方法,包括:获取实际转速和实际转矩;根据目标转速和实际转速拟合虚拟主轴转速;根据虚拟主轴的转速与目标转速确定虚拟主轴的转速偏差;根据转速偏差和虚拟主轴的转矩,确定虚拟主轴的自适应系数;根据自适应系数,确定虚拟主轴的目标转矩; 全部
背景技术:
相关技术中,多电机同步运行时,由于在电机运行过程中受扰动影响较大,现有的 电机控制方法无法及时准确地在电机受到扰动时控制多电机平稳同步的运行,控制过程不 稳定。
技术实现要素:
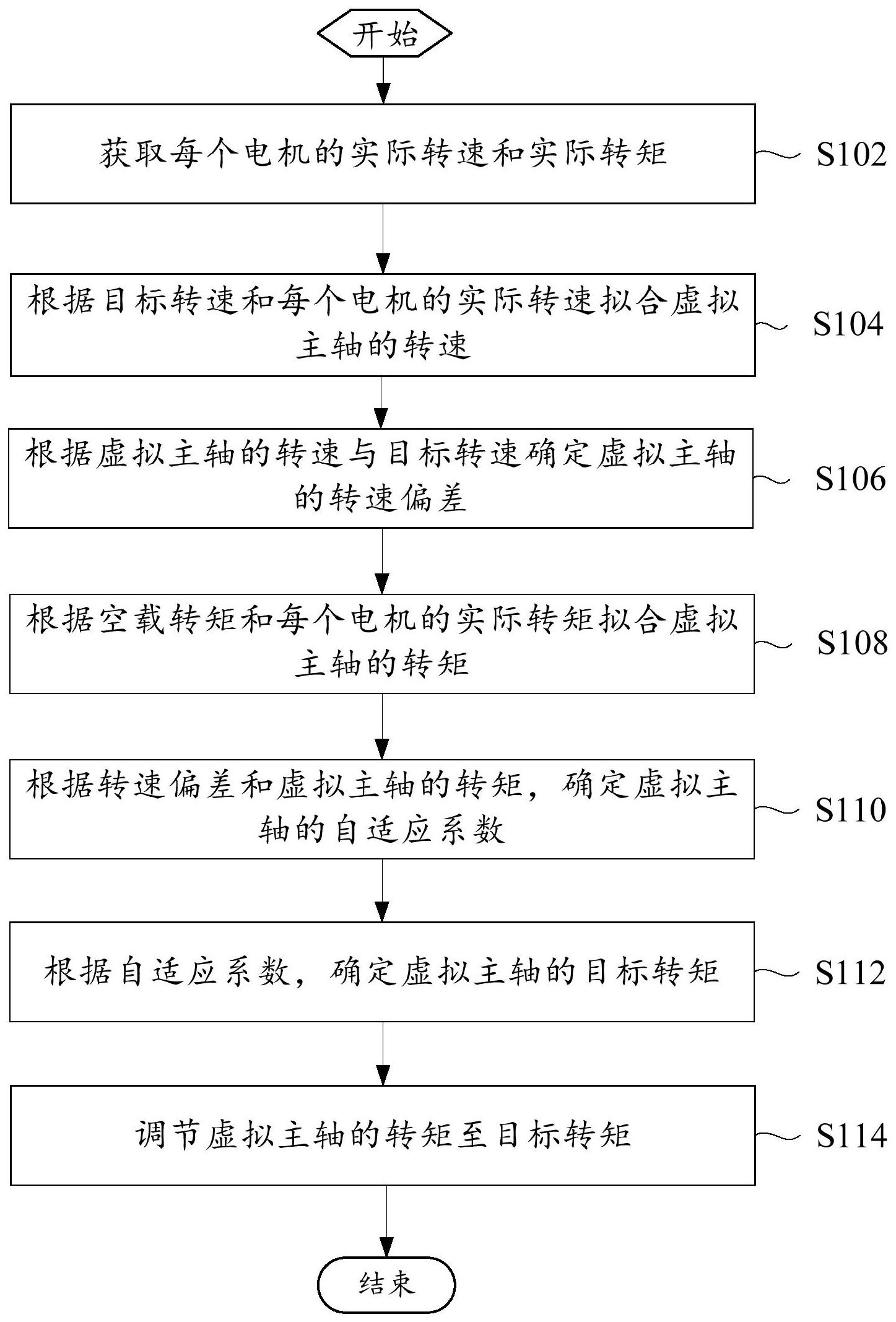
本发明旨在解决现有技术或相关技术中存在的技术问题。 为此,本发明提出了一种电机控制方法。 有鉴于此,本发明提供了一种电机控制方法,电机的数量为多个,多个电机具有相 同的目标转速和空载转矩,电机控制方法包括:获取每个电机的实际转速和实际转矩;根据 目标转速和每个电机的实际转速拟合虚拟主轴的转速;根据虚拟主轴的转速与目标转速确 定虚拟主轴的转速偏差;根据空载转矩和每个电机的实际转矩拟合虚拟主轴的转矩;根据 转速偏差和虚拟主轴的转矩,确定虚拟主轴的自适应系数;根据自适应系数,确定虚拟主轴 的目标转矩;调节虚拟主轴的转矩至目标转矩。 本发明提供的电机控制方法,首先获取每个电机的实际转速和实际转矩,然后根 据每个电机的实际转速和目标转速进行拟合虚拟主轴的转速,同时,根据每个电机的实际 转矩和空载转矩进行拟合虚拟主轴的转矩,从而将多电机的控制拟合为虚拟主轴的控制, 进一步地,根据虚拟主轴的转速和目标转速确定虚拟主轴的转速偏差,然后通过转速偏差 和虚拟主轴的转矩,确定虚拟主轴的自适应系数,进而通过自适应系数,确定虚拟主轴的目 标转矩,最后调整虚拟主轴的转矩至目标转矩,从而实现了虚拟主轴转矩的自适应调整。本 发明提供的电机控制方法,根据多个电机的空载转矩与实际转矩以及多个电机的目标转速 和实际转速,将多个电机的运行拟合为虚拟主轴的运行,进一步地,通过自适应系数调整虚 拟主轴的目标转矩,实现了虚拟主轴运行的自适应调整,进而实现了电机根据自身负载和 运行时间的变化而进行自适应调整,提高了电机控制的稳定性。 另外,本发明提供的上述技术方案中的电机控制方法还可以具有如下附加技术特 征: 在上述技术方案中,进一步地,调节虚拟主轴的转矩至目标转矩,具体包括;根据 电机的类型和目标转矩确定虚拟主轴的转矩随运行时间变化的s形曲线函数;根据s形曲线 函数,调节虚拟主轴的转矩至目标转矩。 在该技术方案中,通过电机的类型和虚拟主轴的目标转矩确定出虚拟主轴的转矩 随运行时间变化的s形曲线函数,从而可以实现根据运行时间的逐渐推移,逐渐的改变虚拟 主轴的转矩,进而实现了电机转矩变化过程的平稳过渡,根据速度变化率辅助判断调整曲 线斜率和偏移,在全范围内防止转矩突变的情况下调整平顺效果,保证转矩在不牺牲控制 4 CN 111555665 A 说 明 书 2/11 页 响应速度的情况下平滑过渡,避免了在调节转矩时,由于调节量过大,导致转矩瞬间变化对 电机的负载形成较大冲击,造成电机故障等严重后果,进一步地提高了电机控制方法的稳 定性。 在上述任一技术方案中,进一步地,根据目标转速和实际转速确定虚拟主轴的转 速,具体包括:根据目标转速和每个电机的实际转速,确定每个电机的转速差;根据每个电 机的转速差,确定每个电机的转速权重系数;根据第一预设公式和每个电机的转速权重系 数确定虚拟主轴的转速;根据空载转矩和每个电机的实际转矩确定虚拟主轴的转矩,具体 包括:根据空载转矩和每个电机的实际转矩,确定每个电机的转矩差;根据每个电机的转矩 差,确定每个电机的转矩权重系数;根据第二预设公式和每个电机的转矩权重系数确定虚 拟主轴的转矩。 在该技术方案中,拟合虚拟主轴的转速的过程为:首先,根据目标转速和每个电机 的实际转速,计算每个电机的转速差,然后根据每个电机的转速差来确定每个电机的转速 权重系数,具体地,根据电机的目标转速、负载量等实际参数,可设置多个不同的预设转速 差范围,每个预设转速差范围对应一个转速权重系数,将计算得出的每个电机的转速差与 预设转速差范围进行对比,确定每个电机对应的转速权重系数,最后根据第一预设公式和 每个电机的转速权重系数,确定虚拟主轴的转速。 具体地,第一预设公式为:V0=Vs/ks; 其中,V0为虚拟主轴的转速, Vi为每个电机的 实际转速,ki为每个电机的转速权重系数,i为大于或等于1的整数,i的不同值代表不同的 电机。 进一步地,拟合虚拟主轴的转矩的过程为:首先,根据空载转矩和每个电机的实际 转矩,计算每个电机的转矩差,然后根据每个电机的转矩差来确定每个电机的转矩权重系 数,具体地,根据电机的空载转矩、负载量等实际参数,可设置多个不同的预设转矩差范围, 每个预设转矩差范围对应一个转矩权重系数,将计算得出的每个电机的转矩差与预设转矩 差范围进行对比,确定每个电机对应的转矩权重系数,最后根据第二预设公式和每个电机 的转矩权重系数,确定虚拟主轴的转矩。 具体地,第二预设公式为:T0=Ta/la; 其中,T0为虚拟主轴的转矩, Ti为每个电机的实 际转矩,li为每个电机的转矩权重系数,i为大于或等于1的整数,i的不同值代表不同的电 机。 在上述任一技术方案中,进一步地,根据空载转矩和每个电机的实际转矩拟合虚 拟主轴的转矩之后,还包括:设置多个第一预设转速范围;设置多个第一预设转矩范围。 在该技术方案中,根据电机的型号、空载转矩等参数以及相关技术人员的实际经 验,设置多个第一预设转速范围和多个第一预设转矩范围,每个第一预设转矩范围和第一 预设转速范围的组合对应一个虚拟主轴的第一目标转矩,然后根据虚拟主轴的转速偏差所 在的第一预设转速范围和虚拟主轴的转矩所在的第一预设转矩范围,确定虚拟主轴的目标 转矩,实现了虚拟主轴数据的模糊化,进而实现了对电机的模糊控制,在保证了对多电机同 步控制过程的精度的同时,减少了控制过程中数学模型的建立和数据的计算,控制过程更 5 CN 111555665 A 说 明 书 3/11 页 加易于实现。 在上述任一技术方案中,进一步地,根据自适应系数,确定虚拟主轴的目标转矩, 具体包括:根据自适应系数和第一预设转速范围,确定第二预设转速范围;根据自适应系数 和第一预设转矩范围,确定第二预设转矩范围;根据转速偏差所在的第二预设转速范围和 虚拟主轴的转矩所在的第二预设转矩范围,确定虚拟主轴的目标转矩。 在该技术方案中,由于在电机运转过程中,电机负载要求和自身运行状态可能发 生变化,也就是说电机目标转矩的确定方式可能随运行时间的变化而变化,因此,电机目标 转矩的确定需要进行适应性调整,从而满足当前电机的运行状态,防止电机运行故障。通过 自适应系数的确定,实现了将第一预设转速范围和第一预设转速范围调整为第二预设转速 范围和第二预设转矩范围,进一步地,根据转速偏差所在的第二预设转速范围和虚拟主轴 的转矩所在的第二预设转矩范围,确定虚拟主轴的目标转矩,从而确定虚拟主轴的最终目 标转矩,实现了虚拟主轴运行的自适应调整,进而实现了电机运行过程中根据自身负载和 运行时间变化的自适应调整,提高了电机同步控制的稳定性。 在上述任一技术方案中,进一步的,根据转速偏差和虚拟主轴的转矩,确定虚拟主 轴的自适应系数,具体包括:根据第三预设公式确定转速偏差的变化率;根据第四预设公式 确定虚拟主轴转矩的变化率;根据第五预设公式确定自适应系数。 在该技术方案中,根据虚拟主轴的转速偏差和转矩,可以确定虚拟主轴的自适应 系数,再根据虚拟主轴的自适应系数确定预第二设转速范围和第二预设转矩范围,从而实 现了电机控制的自适应,进一步提高了电机控制方法的稳定性和通用性。 具体地,第三预设公式为: 第四预设公式为: 第五预设公式为: 其中,ΔV0为虚拟主轴的转速偏差,ΔV0′为转速偏差的变化率,T0为虚拟主轴的转 矩,T0′为虚拟主轴转矩的变化率,t为运行时间,ka为虚拟主轴的自适应系数,a和b为虚拟主 轴自适应系数的权重系数,c为虚拟主轴自适应系数的偏移系数,a、b、c三个系数均可以根 据电机的类型等参数和相关技术人员的实际经验来确定,e为自然常数。 在上述任一技术方案中,进一步地,电机控制方法还包括:根据第六预设公式,确 定转速偏差的离散数字量;根据第七预设公式,确定虚拟主轴转矩的离散数字量;根据转速 偏差的离散数字量和虚拟主轴转矩的离散数字量,确定虚拟主轴的目标转矩。 在该技术方案中,通过将虚拟主轴的转速偏差和虚拟主轴的转矩进行数字离散, 从而将虚拟主轴的转速偏差和虚拟主轴的转矩组合转化为0-1之间的某个数字,进而将虚 拟主轴转速偏差和虚拟主轴转矩两个量所组成的变量域映射到[0,1]区间的标准论域,[0, 1]区间的标准论域内的每一个组合对应一个转矩值,转速偏差的离散数字量和虚拟主轴转 矩的离散数字量所组成[0,1]区间的标准论域内的数字组合所对应的转矩值,即为虚拟主 轴的目标转矩。实现了将目标转矩确定的通用化,即通过将转速偏差和转矩转化为离散数 字量,再根据离散数字量的组合即可确定虚拟主轴的目标转矩,无需根据电机的型号的参 数确定预设转速范围和预设转矩范围,进一步的简化了电机的控制过程,提高了电机控制 6 CN 111555665 A 说 明 书 4/11 页 方法的通用性。 具体地,第六预设公式为: 第七预设公式为: 其中,ΔV0(u)为转速偏差的离散数字量,ui为转速偏差所在的预设转速范围所对 应的离散数字量系数,ui可以根据电机的参数来确定,T0(s)为虚拟主轴转矩的离散数字量, si为虚拟主轴转矩所在的预设转矩范围所对应的离散数字量系数,si可以根据电机的参数 来确定,i为大于或等于1的整数,i的不同值代表不同的电机。 本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践 了解到。 附图说明 本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得 明显和容易理解,其中: 图1示出了本发明第一个实施例的电机控制方法的流程示意图; 图2示出了本发明第二个实施例的电机控制方法的流程示意图; 图3示出了本发明第三个实施例的电机控制方法的流程示意图; 图4示出了本发明第四个实施例的电机控制方法的流程示意图; 图5示出了本发明第五个实施例的电机控制方法的流程示意图; 图6示出了本发明一个实施例中的电机控制方法的拓扑示意图; 图7示出了本发明一个实施例中电机控制方法的控制过程框图。











