
技术摘要:
本申请实施例提供了一种机器人执行清扫工作方法、设备及计算机可读存储介质,涉及智能家居领域。该方法包括:当接收到携带预设区域对应区域信息的提示消息时,客户端显示提示消息,提示消息用于提示用户是否将预设区域设置为禁区,预设区域为检测到跌落信号的区域,当 全部
背景技术:
随着信息技术的发展以及人们对生活质量要求的不断提高,智能家居产品逐渐出 现在人们的日常生活中,其中,具有代表性的扫地机器人越来越受到人们的喜爱。 然而现有的扫地机器人在扫地的过程中可能会从高处跌落,造成该智能扫地机器 人的损坏,并且也会严重影响用户体验,因此,在扫地机器人执行清扫工作的过程中,如何 避免扫地机器人从高处跌落成为一个关键问题。
技术实现要素:
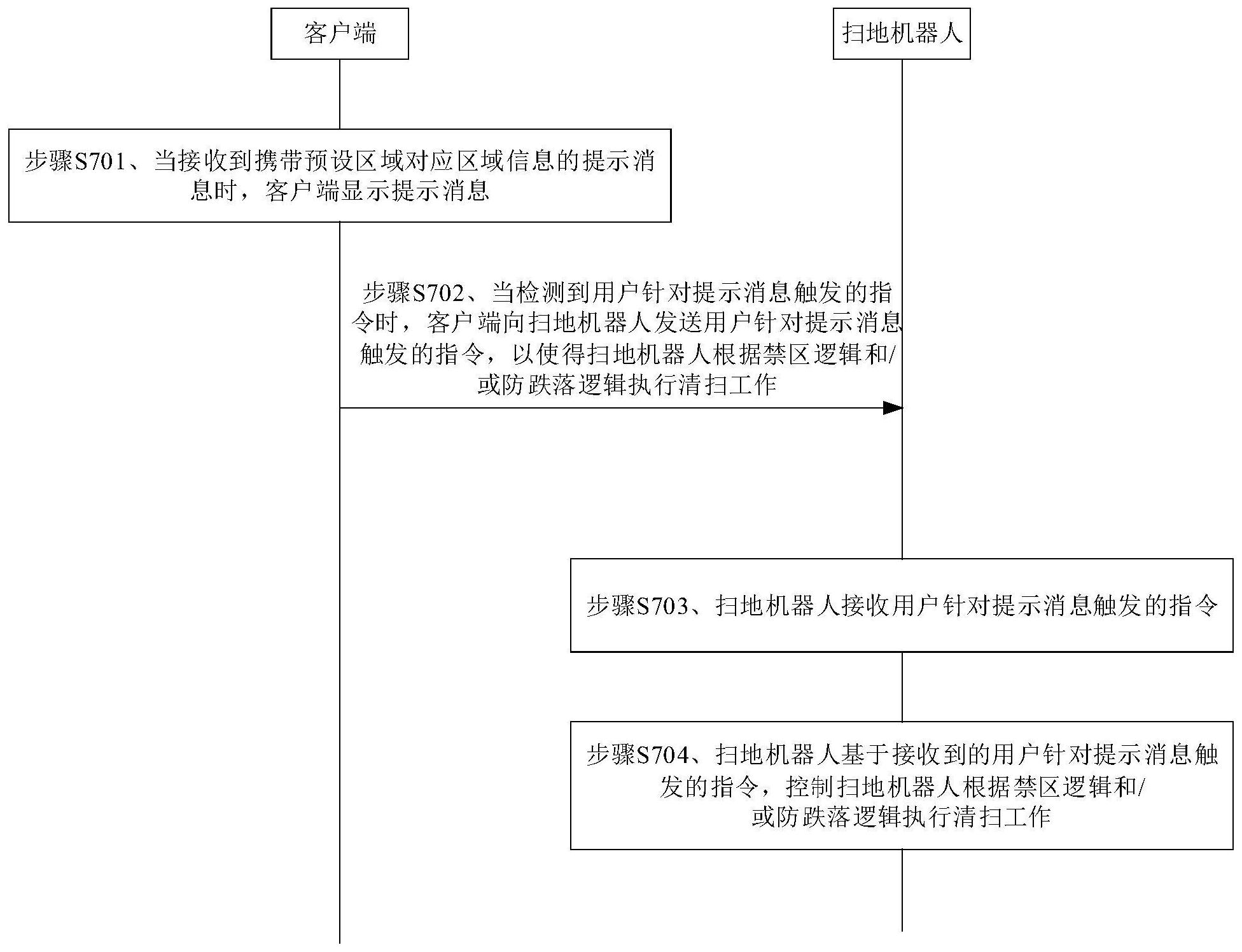
本申请提供了一种机器人执行清扫工作方法、设备及计算机可读存储介质,用于 解决扫地机器人在执行清扫工作的过程中,如何避免扫地机器人从高处跌落的问题。 第一方面,提供了一种机器人执行清扫工作方法,由扫地机器人执行,该方法包 括: 接收用户针对提示消息触发的指令,提示消息用于提示用户是否将预设区域设置 为禁区; 基于接收到的用户针对提示消息触发的指令,控制扫地机器人根据禁区逻辑和/ 或防跌落逻辑执行清扫工作; 预设区域为检测到跌落信号的区域。 在一种可能的实现方式中,接收用户针对提示消息触发的指令,之前还包括: 在扫地机器人执行清扫工作的过程中,当检测到预设区域时,记录预设区域对应 的区域信息; 向客户端发送携带预设区域对应区域信息的提示消息。 在一种可能的实现方式中,向客户端发送携带预设区域对应区域信息的提示消 息,包括: 在环境地图中标注预设区域,得到标注后的环境地图; 向客户端发送携带标注后的环境地图的提示消息。 在一种可能的实现方式中,在环境地图中标注预设区域,得到标注后的环境地图, 包括: 通过特定标识在环境地图中标注预设区域,得到标注后的环境地图。 在一种可能的实现方式中,基于接收到的用户针对提示消息触发的指令,控制扫 地机器人根据禁区逻辑和/或防跌落逻辑执行清扫工作,包括: 当接收到用户针对提示消息触发的确认指令时,将预设区域设置为禁区,并控制 扫地机器人基于禁区逻辑执行清扫工作; 4 CN 111568307 A 说 明 书 2/14 页 当接收到用户针对提示消息触发的取消指令时,控制扫地机器人根据防跌落逻辑 执行清扫工作; 禁区为禁止扫地机器人执行清扫工作的区域。 在一种可能的实现方式中,若提示消息中携带多个预设区域分别对应的区域信 息,则, 基于接收到的用户针对提示消息触发的指令,控制扫地机器人根据禁区逻辑和/ 或防跌落逻辑执行清扫工作,包括: 基于接收到的用户针对提示消息触发的指令,确定待设置为禁区的区域,并设置 禁区; 根据设置的禁区,控制扫地机器人根据禁区逻辑和/或防跌落逻辑执行清扫工作。 在一种可能的实现方式中,检测预设区域的方式,包括: 通过预设传感器检测跌落信号,并将检测到跌落信号的区域,确定为预设区域。 在一种可能的实现方式中,控制扫地机器人根据禁区逻辑执行清扫工作,包括: 当检测到禁区时,控制扫地机器人绕禁区执行清扫工作;和/或, 控制扫地机器人根据防跌落逻辑执行清扫工作,包括: 通过预设传感器检测跌落信号,并在检测到跌落信号时,控制扫地机器人转动,直 至扫地机器人的两个轮均与地面边缘平行,并控制扫地机器人沿与地面边缘平行的方向执 行清扫工作。 在一种可能的实现方式中,向客户端发送提示消息的方式,包括: 通过后台服务器向客户端发送提示消息。 第二方面,提供了一种扫地机器人,包括: 接收模块,用于接收用户针对提示消息触发的指令,提示消息用于提示用户是否 将预设区域设置为禁区; 控制工作模块,用于基于接收到的用户针对提示消息触发的指令,控制扫地机器 人根据禁区逻辑和/或防跌落逻辑执行清扫工作; 预设区域为检测到跌落信号的区域。 在一种可能的实现方式中,扫地机器人还包括:记录模块以及第一发送模块,其 中, 记录模块,用于在扫地机器人执行清扫工作的过程中,当检测到预设区域时,记录 预设区域对应的区域信息; 第一发送模块,用于向客户端发送携带预设区域对应区域信息的提示消息。 在一种可能的实现方式中,第一发送模块包括:标注单元、发送单元,其中, 标注单元,用于在环境地图中标注预设区域,得到标注后的环境地图; 发送单元,用于向客户端发送携带标注后的环境地图的提示消息。 在一种可能的实现方式中,标注单元,具体用于通过特定标识在环境地图中标注 预设区域,得到标注后的环境地图。 在一种可能的实现方式中,控制工作模块,具体用于当接收到用户针对提示消息 触发的确认指令时,将预设区域设置为禁区,并控制扫地机器人基于禁区逻辑执行清扫工 作; 5 CN 111568307 A 说 明 书 3/14 页 控制工作模块,具体还用于当接收到用户针对提示消息触发的取消指令时,控制 扫地机器人根据防跌落逻辑执行清扫工作; 禁区为禁止扫地机器人执行清扫工作的区域。 在一种可能的实现方式中,当提示消息中携带多个预设区域分别对应的区域信息 时,控制工作模块,具体用于基于接收到的用户针对提示消息触发的指令,确定待设置为禁 区的区域,并设置禁区,根据设置的禁区,控制扫地机器人根据禁区逻辑和/或防跌落逻辑 执行清扫工作。 在一种可能的实现方式中,扫地机器人还包括:检测模块以及确定模块,其中, 检测模块,用于通过预设传感器检测跌落信号; 确定模块,用于将能检测模块检测到跌落信号的区域,确定为预设区域。 在一种可能的实现方式中,控制清扫模块,具体用于当检测到禁区时,控制扫地机 器人绕禁区执行清扫工作;和/或, 控制清扫模块,具体用于通过预设传感器检测跌落信号,并在检测到跌落信号时, 控制扫地机器人转动,直至扫地机器人的两个轮均与地面边缘平行,并控制扫地机器人沿 与地面边缘平行的方向执行清扫工作。 在一种可能的实现方式中,第一发送模块,具体用于通过后台服务器向客户端发 送提示消息。 第三方面,提供了一种扫地机器人,其包括: 一个或多个处理器; 存储器; 一个或多个应用程序,其中一个或多个应用程序被存储在存储器中并被配置为由 一个或多个处理器执行,一个或多个程序配置用于:执行根据第一方面或者第一方面的任 一可能的实现方式所示的机器人执行清扫工作方法。 第四方面,提供了一种计算机可读存储介质,存储介质存储有至少一条指令、至少 一段程序、代码集或指令集,至少一条指令、至少一段程序、代码集或指令集由处理器加载 并执行以实现如第一方面或者第一方面的任一可能的实现方式所示的机器人执行清扫工 作方法。 第五方面,提供了一种机器人执行清扫工作方法,由客户端执行,包括: 当接收到携带预设区域对应区域信息的提示消息时,显示提示消息,提示消息用 于提示用户是否将预设区域设置为禁区; 当检测到用户针对提示消息触发的指令时,向扫地机器人发送用户针对提示消息 触发的指令,以使得扫地机器人根据禁区逻辑和/或防跌落逻辑执行清扫工作。 在一种可能的实现方式中,该方法还包括: 在显示提示消息时,显示环境地图,环境地图中标注有预设区域对应区域信息。 在一种可能的实现方式中,若提示消息中携带多个预设区域分别对应的区域信 息,则, 当检测到用户针对提示消息触发的指令时,向扫地机器人发送用户针对提示消息 触发的指令,包括: 当检测到用户针对提示消息触发的指令时,从多个预设区域中确定待设置为禁区 6 CN 111568307 A 说 明 书 4/14 页 的区域; 向扫地机器人发送用户针对提示消息触发的指令,指令中携带待设置为禁区的区 域对应的区域信息。 在一种可能的实现方式中,向扫地机器人发送用户针对提示消息触发的指令,之 前还包括: 在环境地图中标识确定出的待设置为禁区的区域。 第六方面,提供了一种客户端,包括: 第一显示模块,用于当接收到携带预设区域对应区域信息的提示消息时,显示提 示消息,提示消息用于提示用户是否将预设区域设置为禁区; 第二发送模块,用于当检测到用户针对提示消息触发的指令时,向扫地机器人发 送用户针对提示消息触发的指令,以使得扫地机器人根据禁区逻辑和/或防跌落逻辑执行 清扫工作。 在一种可能的实现方式中,客户端还包括:第二显示模块,其中, 第二显示模块,用于在第一显示模块显示提示消息时,显示环境地图,环境地图中 标注有预设区域对应区域信息。 在一种可能的实现方式中,当提示消息中携带多个预设区域分别对应的区域信息 时,第二发送模块包括:确定单元以及发送单元,其中, 确定单元,用于当检测到用户针对提示消息触发的指令时,从多个预设区域中确 定待设置为禁区的区域; 发送单元,用于向扫地机器人发送用户针对提示消息触发的指令,指令中携带待 设置为禁区的区域对应的区域信息。 在一种可能的实现方式中,客户端还包括:标识模块,其中, 标识模块,用于在环境地图中标识确定单元确定出的待设置为禁区的区域。 第七方面,提供了一种客户端,其包括: 一个或多个处理器; 存储器; 一个或多个应用程序,其中一个或多个应用程序被存储在存储器中并被配置为由 一个或多个处理器执行,一个或多个程序配置用于:执行根据第五方面或者第五方面任一 可能的实现方式所示的机器人执行清扫工作方法。 第八方面,一种计算机可读存储介质,其特征在于,存储介质存储有至少一条指 令、至少一段程序、代码集或指令集,至少一条指令、至少一段程序、代码集或指令集由处理 器加载并执行以实现如第五方面或者第五方面任一可能的实现方式所示的机器人执行清 扫工作方法。 本申请提供的技术方案带来的有益效果是: 本申请提供了一种机器人执行清扫工作的方法、扫地机器人及计算机可读存储介 质,与现有技术相比,本申请接收用户针对提示消息触发的指令,所述提示消息用于提示用 户是否将所述预设区域设置为禁区,并当接收到用户针对提示消息触发的指令,控制扫地 机器人根据禁区逻辑和/或防跌落逻辑执行清扫工作。即本申请中扫地机器人接收用户针 对提示消息触发的指令,能够使得扫地机器人根据客户端用户指令执行清扫工作所使用的 7 CN 111568307 A 说 明 书 5/14 页 禁区逻辑和/或防跌落逻辑,并执行清扫工作,从而可以避免扫地机器人在执行清扫工作的 过程中从高处坠落,进而可以提升用户体验。 本申请提供了一种机器人执行清扫工作的方法、客户端及计算机可读存储介质, 与现有技术相比,当接收到携带预设区域对应区域信息的提示消息时,显示提示消息,提示 消息用于提示用户是否将预设区域设置为禁区,当检测到用户针对提示消息触发的指令 时,向扫地机器人发送用户针对提示消息触发的指令,以使得扫地机器人根据禁区逻辑和/ 或防跌落逻辑执行清扫工作。即客户端用户可以控制扫地机器人是否将检测到跌落信号的 区域设置为禁区,以使得扫地机器人可以根据禁区逻辑和/或防跌落逻辑执行清扫工作,从 而可以避免扫地机器人在执行清扫工作的过程中从高处坠落,进而可以提升用户体验。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对本申请实施例描述中所 需要使用的附图作简单地介绍。 图1为本申请实施例提供的一种机器人执行清扫工作的方法流程示意图; 图2为本申请实施例提供的另一种机器人执行清扫工作的方法的流程示意图; 图3为本申请实施例提供的一种扫地机器人的装置结构示意图; 图4为本申请实施例提供的一种客户端的装置结构示意图; 图5为本申请实施例提供的一种扫地机器人的结构示意图; 图6为本申请实施例提供的一种客户端的结构示意图; 图7为本申请实施例提供的机器人执行清扫工作的交互流程示意图; 图8a为本申请实施例中在环境地图中标注预设区域的一种示例图; 图8b为本申请实施例中在环境地图中标注预设区域的另一种示例图。











